大阪大学(阪大)、北陸先端科学技術大学院大学(JAIST)、岐阜大学の3者は8月26日、機械構造は光応答性ハイドロゲル、アクチュエータは生体分子モーターからなる人工筋肉を備えたマイクロロボットの部品をマイクロ流路内でプリント成形し、その場で組み立てることに成功したことを発表した。
同成果は、阪大大学院 工学研究科の森島圭祐教授、同・王穎哲特任研究員(常勤)、JAIST 先端科学技術研究科 バイオ機能医工学研究領域の平塚祐一准教授、岐阜大 工学部の新田高洋教授らの共同研究チームによるもの。詳細は、米科学誌「Science」系のロボット工学に関連する分野全般を扱う学術誌「Science Robotics」に掲載された。
数mm以下のサイズであるマイクロロボットの中でも柔軟な構造を持つタイプは、生物医学などの分野で幅広い応用の可能性があることから、その実用化が期待されている。しかし小型であるが故に、アクチュエータなど、さまざまな機械部品を組み込むことは困難であり、高機能のマイクロロボットを実用化するための障害となっている。
従来、一般的には機械構造やアクチュエータなど、さまざまな部品を異なる場所で製造し、1つ1つ組み上げていく「ピックアンドプレースアセンブリ」によって、マイクロロボットが作られていたというが、この方法では時間と労力を必要とし、また多くの制限があることが課題となっていたという。
そこで研究チームは今回、自然界の生体内システムの自己組織化プロセスに着想を得て、研究チームが2021年に発表したプリント可能な生体分子モーターからなる人工筋肉に基づき、ロボット部品をその場で加工・組み立てを行って、マイクロロボットを製造する方法を開発することにしたという。
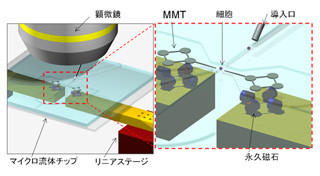
マイクロ流路内で、光照射による微細加工技術の一種である「マスクレスリソグラフィー」により、ハイドロゲル材料の機械的構造がプリントされ、次に人工筋肉がハイドロゲル機構の狙った位置に直接プリントされることで、マイクロロボットは完成となる。そして機構を駆動することで、目的の仕事をその場で行えるようになる。このその場組み立てにより、マイクロロボットを迅速に次々と生産することが可能となるという。
-
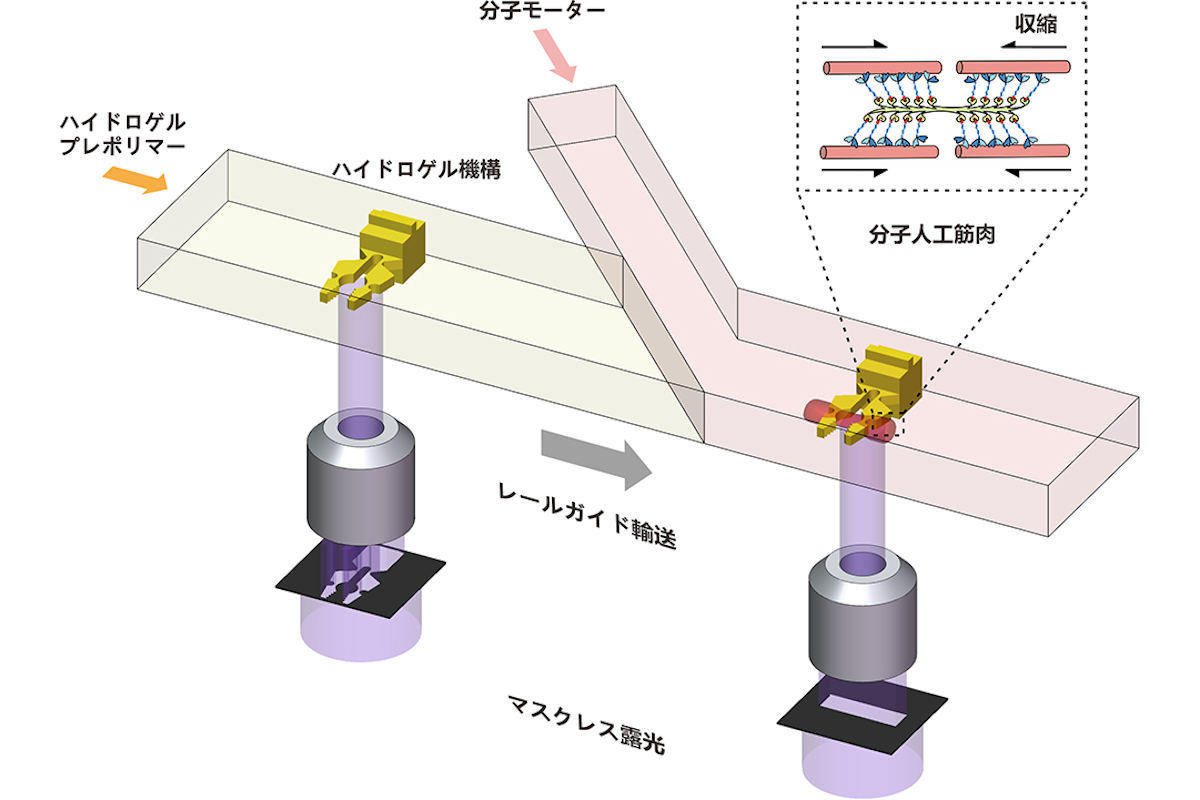
マイクロロボットその場組み立て法 (出所:JAIST Webサイト)

また、マイクロロボットに新しい人工筋肉を再プリントすることにより、アクチュエータを迅速に動的再構成し、複雑な仕事を行うマイクロロボットを実現することにも成功したという。
-

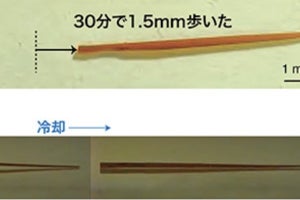
その場組み立て法によって製造されたマイクロロボットが、人工筋肉によって駆動する様子 (出所:JAIST Webサイト)