7月11日から13日まで、東京ビッグサイトでロボット関連の展示会が2つ行われた。「TECHNO-FRONTIER 2012」(以下、TECHNO-FRONTIER)と「第3回 ROBOTECH」(以下、ROBOTECH)だ。ここでは、そこで展示された大学や企業の新型ロボットや関連技術などを紹介する。
マスタースレーブロボットシステム(千葉大学 並木研究室・旭光電機)
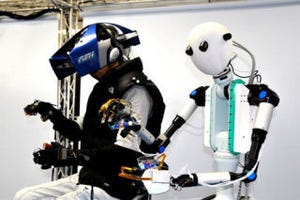
まずは、TECHNO-FRONTIERのロボットから。最初は千葉大学の並木研究室と旭光電機による「マスタースレーブロボットシステム」だ(画像1・2)。

|

|
|
画像1。マスタースレーブロボットシステム。奥の操縦者と手前のロボットのポーズが同期しているのがわかるはず |
画像2。ロボット単体を別角度から。電動車いすに上半身が乗っている形で、白衣を着ているのは、研究者のイメージから |
千葉大の並木明夫准教授は、もともと自律型ロボット(中でも高速マニピュレーション)の研究を行っており、マスタースレーブシステムと自律型ロボットを組み合わせたのが、今回のマスタースレーブロボットシステムとなる。よって、ロボット側である程度動作をサポートする仕組みで開発が進められているのが特徴だ。
例えば、何か物をつかむ動作をマスタースレーブでロボットの腕に行わせるにしても、ある程度つかみやすい位置までロボットの腕が自動的に動いて、その後の精密な操作を操縦者が行う、という仕組みが開発中である(ただし、今回のデモでは一般的なマスタースレーブ方式でロボットを操縦する様子が披露された)。
開発を旭光電機と共同で行っており、各種機器は旭光電機の製品FSシリーズを利用しており、ロボットは耐久試験や性能試験を兼ねるような形で、最新型が搭載されている。
構成されているFSシリーズの内訳は、3次元視聴覚ヘッドマウントディスプレイ(HMD)「FSH-01」(画像3)、力触覚フィードバックのあるフレキシブル・データ・グローブ「FSG-03」(画像4・5)、ロボットに搭載する衝突・接触事故などを防ぐための光学式フルデジタル近接覚センサ「FSA-02」、そして操縦者の全身モーションキャプチャのフレキシブル・センサ・チューブ「FST-03」(画像6・7)、そしてフィードバック機能付き移動型ロボット、という組み合わせである(ロボットのみはまだ製品名はつけられていない)。

|
|
画像3。FSH-01。1フレーム以内の遅延で非圧縮高解像度3次元映像を伝達可能だ。位置情報を基に人とスレーブロボットの頭の位置をシンクロさせられる。スレーブロボット経由で人と会話をすることや、搭載ライブカメラによる自分自身の周囲の映像も得られる |

|

|
|
画像4。FSG-03。すべての指の関節情報を取得可能で、親指、人差し指、中指にはオプションで力触覚フィードバック装置を装着可能で、今回も装備されている |
画像5。FSG-03の手の甲側。力触覚フィードバック装置が取り付けられている。手首に近い部分の白いものは、フレキシブル・センサ・チューブ |

|

|
|
画像6。装着者を横から(上半身)。フレキシブル・センサ・チューブがHMDとデータ・グローブにつながっているのがわかる。チューブの関節ごとに角度センサがあり、それで頭や腕の動きを計測できるというわけだ |
画像7。装着者を横から(全身)。フレキシブル・センサ・チューブはかなりだらんとした感じだが、装着者の体格を問わない(装着も簡便)のと、装着者の動きを制限しないためである。専用スタジオなどなしでモーションキャプチャができる点が特徴。断線検出機能も搭載している |
ロボットは、3次元視聴覚・力接触・近接覚センサによるフィードバック機能が搭載され、自由度は41軸(腕6×2、手指12×2、首×3、胴×2)、移動は電動車いすの機構を利用しているのが特徴だ。カメラは2眼のステレオ、マイクも2つ装備されて、音声もステレオで収集している。今回のデモでは、マスタースレーブで操縦者がロボットの腕を操作して、電動車いすのジョイスティック(ハンドル)を操作して移動を行っていた(画像8~13)。

|

|
|
画像8。ロボットの頭部。双眼カメラと、内部にはマイクも2個。装着者が話すためのスピーカーもある |
画像9。頭部の覆いを取ったところ |

|

|
|
画像10。導体部の白衣をめくったところ |
画像11。腕部ヒジ関節 |

|

|
|
画像12。前腕部と手。前腕部に指の制御機構が用意されている。制御機構を胴体内に用意すると、腕部の配線が複雑となるため、それを回避した形だ |
画像13。移動機構は安定性の高い電動車いすを利用している |
また、このロボットシステムの用途は、人が行うには危険性のある、もしくは実際に危険な作業などである。具体的にデモで紹介されていたのは、化学薬品の実験だ。さまざまなものをつかんで持ち上げたりすることも可能で、およそ2kgを持ち上げられることから、化学薬品の調合なども問題ないというわけだ。デモの様子は、動画を2本に分けて紹介する(動画1・2)。なお、映像中のロボットの背後のモニターには、ロボットからの映像、つまり操縦者がHMDで見ているロボットの視界だ。
| 動画 | |||||
|---|---|---|---|---|---|

|

|
||||
|
|
||||
なお、このロボットシステムの開発には、複数の大学が関わっており、フィードバック機能付き移動型ロボットの開発で協力したのが、並木研究室、ハーモニック・ドライブ・システムズ、テクノロジーサービスの3者だ。
そして、HMDは慶應義塾大学大学院メディアデザイン研究科の舘研究室と大阪芸術大学造形学部デザイン学科の中川研究室、データグローブは慶応大の舘研究室、近接覚センサは電気通信大学知能機械工学科の下条研究室、フレキシブル・センサ・チューブは大阪大学大学院工学研究科の大須賀研究室という具合である。
そのため、HMDなどは7月11日に慶応大の舘暲(たち・すすむ)特任教授らが発表した、テレイグジスタンスロボットシステム「TELESAR V」(記事はこちら)のものと同じなのである。ちなみに舘教授は単にHMDやデータ・グローブの開発協力を分担したというわけではなく、マスタースレーブロボットシステム自体の開発にも協力しているということだ。
空撮&情報収集用電動マルチロータ型飛行ロボット(千葉大学 野波研究室)
続いては、同じく千葉大 大学院工学研究科の野波研究室による、「空撮&情報収集用電動マルチロータ型飛行ロボット」(画像14)。同研究室は飛行ロボットの開発や自律制御の研究を行っており、今回はモーションキャプチャを利用した4発ロータ型電動ヘリコプタ4機を使った自律制御の様子をデモンストレーションで披露した。

|
|
画像14。4発ロータ型電動ヘリコプタ |
ヘリコプタは、ほかのヘリコプタのロータが起こす乱流による影響を受けてしまう50cmまで接近して飛行することが可能だ。今回のデモでも50cmまではいかないが、かなり接近した飛行を披露している。人が操縦した場合、かなりの上級者を4人そろえないと難しいそうだ。
今回のデモでは、スペース上方に10台のモーションキャプチャ用センサを用意し、ヘリコプタそれぞれ異なる形で5つのトラッカーを固定し、機体の識別を行っていた(動画3)。
| 動画 | ||
|---|---|---|
 |
||
|
さらに、同研究室では屋外での飛行の研究を進めており、GPSを用いずにステレオカメラによる地形やランドマークなどを利用した自己位置推定技術も開発済みだ。
実際に、2011年5月初旬には、カメラを搭載した新型機の「6発ロータ型電動飛行ロボット」(画像15)を用いて、東日本大震災の被災地、気仙沼市、石巻市、女川町、南三陸町などを上空から撮影し、被災地の空撮動画もYouTubeで公開している(こちら)。なお、警視庁などの災害警備総合訓練などにも参加しており、9月の防災訓練などにも参加する予定だそうである。

|
|
画像15。6発ロータ型電動飛行ロボット。研究室の最新型だ |
空気圧アクチュエータを用いた福祉介護ロボット(岡山大学 知能機械制御学研究室)
次は、岡山大学アクチュエーター研究センター 大学院自然科学研究科の知能機械制御学研究室の「空気圧アクチュエータを用いた福祉介護ロボット」を複数紹介しよう。
同研究室の特徴は、サポートをする機構をとにかく目立たないようにして、また健常者でもつけてみたくなるようなデザイン性に重点を置いている。その理由としては、現状の装着型の介護・動作支援ロボットの多くが外骨格を使用しているため、目立つサイズやデザインのものが多く、実際の日常生活で心理的になかなか装着しにくい点を解消しようとしているからだ。
確かにロボット好きにとっては試してみたい装着型ロボットやパワーアシストシステムは多数あるが、身障者やお年寄りがそれを装着して電車やバスなどに乗ったり、繁華街やショッピングモールなど人手の多い中を歩けたりするかというと、「恥ずかしい」という気持ちが先立ってしまうと思う。それを、極力感じなくさせようというコンセプトのもとに、同研究室は各種介護ロボットを開発しているというわけだ。
それではまず、「湾曲型空気圧ゴム人工筋を用いたパワーアスストグローブ」から(画像16)。ケガや病気、そのほか年齢などによって握力が衰えてしまって物を握れない、つかめないといった人のためのグローブで、すでに岡山の地元企業から製品として発売されている。
湾曲型空気圧ゴム人工筋とは、ゴムチューブを2種類の布で覆うことで、ゴムチューブの経方向の膨張を抑制し、軸方向のみの伸長するような仕組みを持つ。さらに、2種類の布の伸び量の違い(手の甲側が伸びやすく、手のひら側が伸びにくい)を利用して5指が握ったり、人差し指と親指だけを操作してつまんだりといった操作を実現している。
デモでは、人が動かしているわけではないところを見せるため、手袋単体で操作してもらったので、親指が変な方向に動いてしまっているが、実際にペットボトルを握る動作を見てもらえるはずだ(動画4)。

|

|
|||
|
|
次は、「積層型空気圧ソフトアクチュエータを使用した下肢用空気式パワーアシストウェア」(画像17)。脚力が弱まり、歩行が困難になっている人をアシストするためのもので、布などの弾性材料と空気圧ソフトアクチュエータで構成して、装着や使用の容易さを損なわない範囲でパワーアシストを実現している。ちなみに、靴もズボンとワンセットのシステムの一部分だ。
今回のプロトタイプは、アクチュエータ1個が115g×2、ベルト220g、ズボン590g、靴1組460gで、合計1500gと、普通のズボンと靴と比較して同じどころか、軽いぐらいである。
このパワーアシストウェアは、ヒザに積層型ソフトアクチュエータ(画像18)が備えられており、その斜め上方(太もも裏側)と斜め下方(ふくらはぎ)へナイロンバンドが伸びていて、さらに靴のカカトの下につながっていて、アクチュエータの膨張力をナイロンバンドを介して下肢に伝えることで、ヒザ関節に伸展トルクを発生させるというものだ。実験では、階段の上り下りと行った動作に成功している。
そしてその積層型ソフトアクチュエータだが、布で覆ったアルミフィルム製のバルーンを複数積層している構造で、圧縮空気を供給すると高さ方向(ヒザ部分には地面から垂直に設置されているので装着者の前方)に膨張するというものだ。
現在のプロトタイプは、ヒザ周りの外側にメカが装着されているのがわかるが、将来的にはこうした機構を布の内側に仕込み、外からではぱっと見た感じではわからないようにするという。デモでは、ズボンが動いている様子や、積層型ソフトアクチュエータの膨張する様子を見ることが可能だ(動画5)。

|

|
|
画像17。積層型空気圧ソフトアクチュエータを使用した下肢用空気氏パワーアシストウェア |
画像18。積層型空気圧ソフトアクチュエータ |
| 動画 | ||
|---|---|---|
 |
||
|
次は、「McKibben(マッキベン)型空気圧ゴム人工筋を用いた腰部パワーアシスト装置」(画像19)。これは、身障者やお年寄りに使ってもらう装置ではなく、そうした人を支援する介護士や看護師に使用してもらうことを前提に開発されているものだ。
介護や看護で大変なのが、全身麻痺や下半身麻痺のため、入浴やトイレなどで移動する際に抱き起こしたり抱きかかえたりする支援作業である。これで、介護士や看護師がぎっくり腰などになってしまうという状況が多々発生していて、非常に問題になっているわけで、それをサポートしようというのがこの装置である。
こちらは外骨格が使用されており、腰をコルセットのように固定し、太もも同様にし、肩部もストラップで固定し、肩胛骨の辺り及び背中側の肋骨の下辺りと、太もも下部(ヒザ裏)をMcKibben型空気圧ゴム人工筋でつないでおり、腰を軸に上半身に背中側への回転トルクを発生させて、持ち上げ動作をアシストするという仕組みだ。
全身装着型に比べるとアシストできる力は減り、装置の重量も装着者自身の脚にかかるわけだが、総重量は約4kgと軽い。また装着自体も全身型に比べれば手間が少ない。腕部のアシスト機能はないが、その分、入浴作業などでも濡れても大丈夫なことに加えて、手狭なスペースでも比較的使用しやすいという特徴となっている。
また、McKibben型空気圧ゴム人工筋は、同研究室以外のアシストスーツなどでも利用されており、人工筋肉で最も利用されていると思われる。ゴムチューブの中に圧力を加えると、経方向に膨張し、軸方向に収縮するという特性があり、筋肉の伸縮を模倣しているというわけだ。
動画6がデモの様子だが、人が装着しているわけではないのでわかりにくいが、装置が背中を向けている状態で撮影している。

|

|
|||
|
|
そのほか、実際に動作しているところは見られなかったのだが、「空気圧式パラレルマニピュレータを用いた手首リハビリ支援装置」(画像20)や「装着者の体重を利用した空気式歩行支援シューズ」(画像21)も実機が展示されていた。

|

|
|
画像20。空気圧式パラレルマニピュレータを用いた手首リハビリ支援装置 |
画像21。装着者の体重を利用した空気式歩行支援シューズ |
手首リハビリ支援装置は、ケガなどで手首がうまく動作しなくなってしまった人が非常に多いのだが、現状リハビリ支援を行える理学療法士の数が約3万5000人なのに対し、施設の方は約1万2000カ所と、理学療法士の数の不足を補おうというコンセプトで開発中の装置である。
また歩行支援シューズは、お年寄りなど、歩行時につま先を上げにくくなり、転倒しやすくなってしまった人を電気の使用なしに実現した装置だ。かかとに体重をかけると足首関節のアクチュエータに空気を送り、バネの仕組みを利用して回転トルクを発生させ、つま先が持ち上がるという仕組みである。よって、利用者自らの体重を利用するだけなので、電池切れの問題やバッテリ交換といった手間がないというわけだ。
ソフトメカニズム(岡山大学 鈴森・神田研究室)
続いては、岡山大学の鈴森・神田研究室の人工筋肉系のメカを紹介。こちらは水圧を利用した人工筋肉などの「ソフトメカニズム」や「ソフトアクチュエータ」を研究しており、それらを利用したロボット、マイクロロボット、レスキューロボットなどの開発を行っている。
同研究室で開発中の技術の1つが、「高水圧McKibben型人工筋」だ(画像22)。これは、McKibben型空気圧ゴム人工筋のパワーアップを目指したもので、仕組みは同じで、空圧で行っていたところを水圧で行うというもの。パワーが出る分、圧力が高いため人工筋を構成するチューブなどへの負荷が当然ながら強いので、高強度のPBO繊維をスリーブとして三層チューブの周囲に編み込んでいる。それにより、最大30MPaの耐圧性能を実現した。

|
|
画像22。高水圧McKibben型人工筋。スリーブの素材をより光強度のPBO繊維に変更したほか、高出力化に合わせた改造はされているが、基本は空気圧McKibben型人工筋と同じ |
繊維の編み角を調整することでチューブの伸縮方向を調整でき、編み角25度の時、1.5MPaの印加で25%の収縮率を達成。内径13mmで作製された人工筋は、7.0MPa印加時に最大収縮力が約8.0kNを記録したそうである。ただし、空圧式のように製品化まではもう少し時間がかかるようだ。
そのほか、以前から開発が進められているものだが、水圧を利用した人工筋による「マンタロボット」(動画7)や超小型(直径2mm×長さ15mm)の「大湾曲ラバーアクチュエータ」(動画8)などのデモンストレーションも行われていた。
| 動画 | |||||
|---|---|---|---|---|---|

|

|
||||
|
|
||||
テムザック
また、テムザックが1999年製のマスタースレーブ型の遠隔操作ロボット「テムザックIV号機」(画像23・24・動画9)、2009年生の車いすロボット(パーソナルモビリティ)「RODEM」(画像25)の操作体験を実施し、小型コミュニケーションロボット「ロボリア」(画像26)も展示されていた。

|

|
|||
|
|

|

|
|
画像24。テムザックIV号機の操縦装置。実際に動かしてみて、思い通りに動かすのはちょっとコツがいる感じ |
画像25。パーソナルモビリティのRODEM。広い会場での展示会は、こうしたパーソナルモビリティーに乗って回りたいので、ぜひビッグサイトに導入を |

|
|
画像26。ロボリア。こうした小型のコミュニケーションロボットは一人暮らしのお年寄りなどの家で利用価値がありそうだが、日本の法律が普及の前に立ちふさがっている状況 |
UMRS2010
また、福島原子力発電所で使用されている「Quince」や先日発表された「Rosemary」(記事はこちら)と同様に国際レスキューシステム研究機構が開発に関わっているレスキューロボット「UMRS(Utility Mobile Robot for Search)」シリーズの最新型の「UMRS2010」(画像27)も展示されていた。この機体は、神戸の弓削商船高等専門学校 情報工学科が開発を担当し、震災直前の2011年3月に完成。たまたまだったそうだが、原子力発電所での使用も想定した設計となっているそうである。
この1つ前のボディが青い機体の「UMRS2009」は、ドアノブを回して開けられるロボットアームを搭載しているなどで有名だが、「UMRS-2010」はその直系の改良強化型でコンパクトさ運用性の高さを追求しており、ノートPCを利用した操縦システムも加えてロボット本体もひとりで背負って災害現場などに持って行けるのを特徴としている(ただし、本体重量は32kgとかなりあるので、一般人が背負うにはさすがに少々重たい)。

|
|
画像27。UMRS-2010。前モデルは青系のさわやかな色合いの機体だったが、今回は黒系の渋いカラーリングでまとめられている |
続いては、ROBOTECHで展示されていた機体を紹介。新型、もしくは一般にあまり公開されていないロボットとしては、RTミドルウェア公式リファレンスロボット「OROCHI」、アサンテの白アリ防除ロボット「ミルボIV」、ハイボットの配管内ロボット「Pipetron」などだ。
OROCHIは10月発売予定のアールティの最新製品で、産業技術総合研究所などで開発されたRTミドルウェアの公式リファレンスロボットで、学生向けのRTミドルウェアの学習用教材、屋内ホームロボット用の研究開発用などを想定した高級ロボットアームだ(画像28・動画10)。価格は367万5000円(税込)。

|

|
|||
|
|
アサンテのミルボIV(画像29)は、名称の通り、4世代目となる白アリ防除ロボット(記事はこちら)。3代目に比べるとデザイン的に地味になった雰囲気だが、それは現場での実用性を重視してのことで、家屋の床下に潜るという目的から、車高を低くし、引っかかりかねない凹凸などを廃している。また、ケーブルも極力引っかからないよう非常に柔らかい素材に変更した。
アサンテでは、ミルボIVは実用機に近い位置づけで、顧客からの要望があれば同機による床下点検を行うことにしている。なお、床下点検自体は無料だそうだ(もちろん、実際の駆除などは有料)。

|
|
画像29。ミルボIV。一見すると地味だが、これは実用性を最優先した結果で、床下では車高が低いこと、引っかからないよう余計な出っ張りなどがないことが重要ということを体現している |
東京工業大学の広瀬・福島研究室と関係の深いロボットメーカー「ハイボット」は、パイプ点検用ロボット「Pipetron」(画像30)や、レスキューロボットのベテラン機体「蒼龍-IV」(画像31)などを披露。今回のPipetronは試作機だが、製品化も進んでいて、実際に使用が始まっているという。90度の曲がり角も余裕でクリアする多関節ぶりをご覧いただきたい(動画11)。
また、蒼龍IVは最近はあまり見られないので、こちらも動画で撮影。ひっくり返っても簡単に起きられる様子とか、多関節(ヘビ)型ロボットの動きを久しぶりにご覧あれ(動画12)。

|

|
|||
|
|

|
|
|||
|
|
また、マイクロソフトの家庭用ゲーム機Xbox 360の周辺機器「Kinect」および同じようなシステムを利用した3次元計測カメラ(モーションセンサ)を活用したシステムが複数見受けられた。
例えば、ダブル技研の「D-Vision」は、これまで100万円以上していた3次元計測カメラをKinectなどの1~2万円程度の市販3次元計測カメラを利用した画像認識による3次元ピッキングシステムなどを披露(画像32・動画13)。そのほか、Kinectを用いた安全確認のためのシステム(危険エリアに人が立ち入るとそれを認識する)などもデモを行っていた(画像33)。

|

|
|||
|
|

|
|
画像33。Kinectの利用シーンは増え続けており、今回のダブル技研は一例として、工場での人感センサとしての利用を提案していた。人が危険エリアに近づくにつれ、ランプが緑→黄→赤と変化する |
フォーラムエイトは、ゼットエムピーの1/10スケールのカーロボティクス・プラットフォーム「RoboCar」と組み合わせた景観シミュレータ「UC-win/Road for RoboCar」に、さらにKinectを利用したドライビングシステムを組み込んでいた。実機のRoboCarを操作すると同時に、バーチャルリアリティ空間内のRoboCar(こちらは1/1でドライバー視点)も操作するという内容だった(画像34)。
とにかく、Kinectは性能に対してこれまでより桁違いに安価ということで、あらゆる面での利用が進んでいるのを改めて確認できた。

|
|
画像34。UC-win/Road for RoboCarにKinectを組み合わせて、コックピットを用意。こうしたシチュエーションでは、ちょっと前まではレースゲーム用のステアリングホイール及びペダル型のコントローラが使われていたが、今はKinectというわけだ |
そのほか、ロボットっぽくてよかったのは、日本バイナリーが扱っているShadow Robot社製で、人の指の動きを忠実に再現した5本指ロボットハンド「Shadow Hand Model C6M」(画像35)。動いているところは見られなかったが、たたずまい(?)が非常に人の手に近く、今まで見たロボットハンドの中では、個人的には人の指の再現度ではナンバー1だと思う1台である。

|
|
画像35。モータ駆動式のShadow Hand Model C6M。空気圧駆動式の「Model C6P」もある |
その再現性の高さの理由の1つが、関節数・自由度数の多さ。親指だけで5関節5自由度、残りの4本は4関節3自由度、小指には内側に曲がるもう1つの関節があり、手首は前後左右の2関節2自由度という具合で、片手だけで合計24関節・20自由度もあるのだ。
なお、ロボットの関節について知っている人なら、普通は関節数=自由度として表現されるのはご存じだろう。しかし、Shadow Handの親指を除く4本の指に関しては、関節数に対して1自由度少ない。これは、各指の遠位指節間関節(いわゆる指先側の第1関節)が、人の指と同様に近位指節間関節(いわゆる真ん中の第2関節)と連動しているためで、遠位指節間関節の動きが能動的なことから、自由度が関節数よりも少なくなっているのである。つまり、第2関節を曲げると、同時に第1関節も曲がるので、グーを握る方向に行くというわけだ(ただし、写真は固定ポーズのまま動作させていないので、第2関節が曲がっているのに第1関節はまっすぐ伸びている)。
今回、2つの展示会を回ってみて、Kinectの活用も含めてセンサの高精度化(触覚センサの高性能化や画像認識の高精度化)を感じた。また、今回に限ったことではないが、人工筋肉の研究も相変わらず面白いところである。指先の感覚が人に近い触覚を持ったロボットや、外骨格にサーボモータによる駆動で動作するのではなく、内骨格に人工筋肉で駆動するロボット(これまでも研究は行われている)がなんだか増えてきそうな感じがするが、皆さんはどう思われただろうか。
正確な動作を繰り返し行う場合は外骨格とサーボモータの組み合わせの方が確実に適しているので、何でもかんでも内骨格の人工筋肉製のロボットにすればいいわけではないのだが、不況で大変だとはいわれながらも、少しでも確実に技術が進歩しているのを感じたので、今後も面白い技術やロボットを期待して待ちたい。