GITAI Japanは8月4日、宇宙ステーションにおける大型モジュール建設や、貨物輸送機とのドッキングなどの用途を想定した、10m級の大型自律ロボットアーム「GITAI S10」を開発中であることを発表した。
また、GITAI S10が米国航空宇宙局(NASA)の技術成熟度レベル(TRL)におけるレベル3に対応する各種試験に成功したことも併せて発表された。
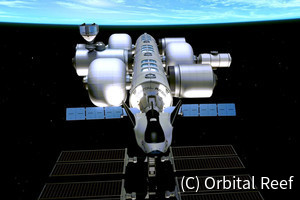
近年、世界レベルで宇宙開発や宇宙の商用化が活発化している。それに伴い、人工衛星に対する燃料補給や修理・メンテナンス、スペースデブリの除去といった軌道上サービスや、民間宇宙ステーションの建設作業に関する需要が急増している。そうした状況を受け、宇宙での汎用的な作業の遂行を可能にする自律ロボットアームが求められている。
同社は、そうした宇宙用ロボットアームの開発と提供をしているスタートアップ。すでに2m級自律ロボットアーム「GITAI S2」の開発を先行して進めており、2022年2月には宇宙航空研究開発機構(JAXA)の8m級熱真空チャンバー内で技術実証に成功。「地上でのシステムとしての技術成立性の確認」のTRL6を達成した。2023年には、「宇宙空間でのシステムとしての技術成立性の確認」のTRL7の達成に向けて、国際宇宙ステーション(ISS)船外での実証実験が予定されている。
今回、GITAIが公開したGITAI S10は、顧客のさまざまな作業ニーズに短期間で応えられる柔軟性を有することが最大の特徴だという。同社は、宇宙用ロボットアームの開発に必要なハードウェア、エレクトロニクス、ソフトウェアなどの要素技術をすべて社内に所有しており、製品を一気通貫で開発できる独自の開発手法によって、その最大の特徴を実現しているとする。
-
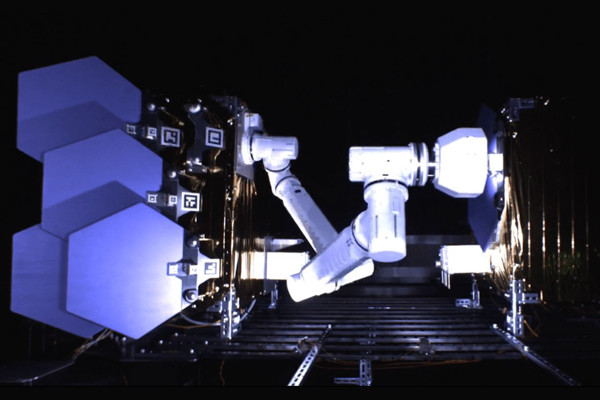
開発が進むGITAI S10 (出所:GITAI Japanプレスキット)