



既報のとおり、パナソニックは1月25日、都内に設置した共創型イノベーション拠点「Robotics Hub」を公開したが、そこでは、実際に外部の大学や企業などと連携して研究開発を進めているロボティクス技術の紹介なども行われた。
-

Robotics Hub

今回、紹介されたのは以下の4つのロボティクスに関連する技術となる。
- 第三の腕
- 感覚拡張
- 移動ロボット評価
- 要素技術
人間の機能を拡張させる第三の腕
「第三の腕」は、早稲田大学 創造理工学部 総合機械工学科の岩田浩康 教授(兼 グローバルロボットアカデミア研究所 所長)とパナソニックの共同開発による、Augmentation領域(Enlarge)に向けた腕ならびに手の機能の拡張に関する研究成果の1つとなる。
-

右が岩田教授。左が第三の腕を装着したスタッフ

デモでは、通常であれは2人必要な建物の施工時などにおける天井への板の取り付け作業を、第三の腕を身につけた作業員が1人で同様のことを行うことが可能であることが示された。
-
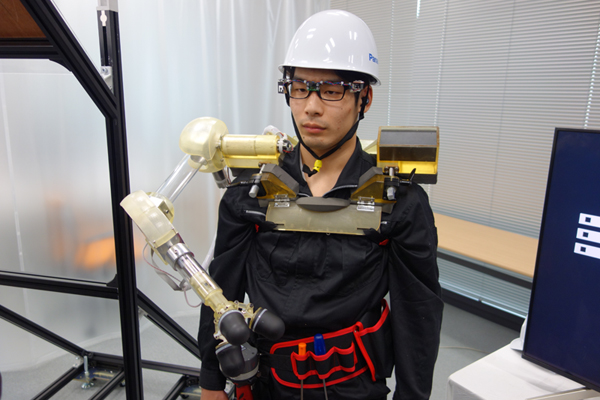
第三の腕を装備した状態。別に人間が装備する必要はなく、壁に埋め込んだ状態などでも、人間と何らかのインタラクションが取れれば操作することは可能だという

公開された第三の腕の仕組みは、カメラやセンサなどを備えたスマートグラス型デバイスを作業員の顔に装着。そこから各種の座標データや距離の把握などを行い、それを第三の腕の制御にフィードバック。音声に応じて、要求された動きを行うというものとなる。
第三の腕を用いた天井への板の取り付け作業の様子
ロボットハンドは、粉粒体のジャミング転移を活用することで、さまざまな形状の物体を把持することを可能としている。
第三の腕の物体把持の仕組み
また、重量は片腕で2.5kgほど(バランスを取るために、反対の肩に同様の重さのカウンターウエイトを配置しているため、総重量は5kgほど)のため、人間のほうで、それだけの重さに耐えられれば、腕の本数を増やすことも可能と見られるが、その際に問題になるのがコントロールをどうするか、という点。この点については、まだ試行錯誤が必要だとのことであった。
さらに、デモではAC100Vのコンセント直付けで駆動させていたが、実際の現場ではバッテリーによる運用が想定されており、その辺の技術も一日の長があるパナソニックに期待したいとのことであった。
手に持つだけ、様々な場所を体験できる感覚拡張
「感覚拡張」はAugmentation領域(Enrich)向けに、ハビテックの石川善樹 研究所長と共同で開発を進めている取り組みで、視覚、聴覚、触覚を活用した歩行感覚を拡張するデモが公開された。
日常の基本動作をEnrichするロボという方向性のもと、開発のコンセプトを「『歩く』を再発明する」とし、さまざまな刺激(今回は視覚、聴覚、触覚)を与えることで、それを実現しようという試みとなっている。
目指すのは、都市を歩きながらも、自然のなかを歩いているかのような状況を作りあげるということ。石川氏は、「自然の中に居た方がストレスが少ない。研究論文としては2017年に発表されたもので、そこでは自然の中にはマルチモーダルな刺激があるためだとしている」とのことで、複雑かつさまざまな刺激を都市で提供する方法のプロトタイプとして、雪の中や水の中などを歩いているような感覚になるシステムを考案したとする。
具体的には、等身大の映像刺激、その映像を意味する周辺環境の音刺激、そして手に持った触覚デバイスによる歩くごとに提供される擬似的なその空間に沿った刺激で構成される。本当は匂いも用意できればよいのだが、と石川氏は語るが、まだそこまではできていないそうである。
-
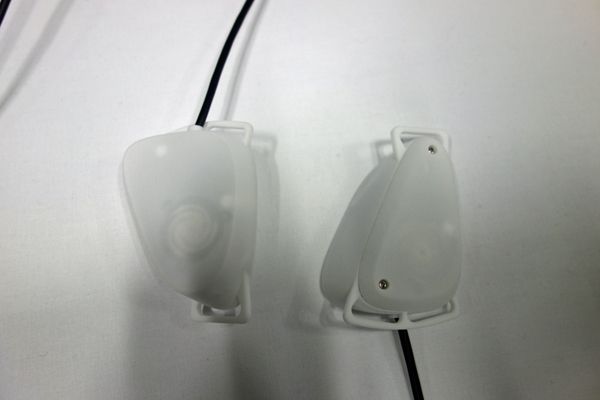
感覚拡張に用いられる触覚デバイス。ケーブルが右手の下側に来るように持つと一番、認識がしやすいという

また、歩くのであれば、触覚デバイスは手ではなく、足のほうが良いのではないかと思う人もいるかと思うが、石川氏によると、認識率が足よりも手に持ったほうが、高いという研究結果によるためだという。実際、手の筋肉は、人間が普段意識しなくても、細かく振動していることが分かっており、感覚に機敏な反応を示すことから、そういった結果が導き出されたものと考えられる。
感覚拡張による新たな歩行体験の実現に向けたデモの様子
重い荷物が自動でついてくる「移動ロボット」
「移動ロボット評価」は、Automation領域研究の1つで、次世代電動車いす・パーソナルモビリティ「WHILLシリーズ」を手がけるWHILLと共同で開発を進めている自動運転方のパーソナルモビリティの実現に向けた取り組みで、デモとしては、自動運転尾WHILLの後ろを、自動追尾型の無人荷台がついてまわる、というものが公開された。
今回は空港での利用を想定した環境(スロープなど)を用意して、開発評価などを行う様子が示されたが、自動運転機能自体は、WHILLがCES 2019に併せて発表したものではなく、パナソニックが開発したものを利用。地図については、BIMデータなどから作成する方法と、レーザレンジファインダ(LRF)などを活用して、機体自身が作っていく方法のいずれも開発をしているという。
パナソニックとWHILLが共同で開発を進めている自動運転型パーソナルモビリティのデモの様子
ロボットを支える要素技術
4つ目となる「要素技術」は、文字通り、ロボティクス技術の基幹となるセンシングやアクチュエータといった技術に関してのデモが紹介された。
今回、デモとして公開されたのは、ビデオカメラなどでも活用されている振動を吸収するスタビライザ技術と、高精度制御による跳躍ロボットの2つ。
-
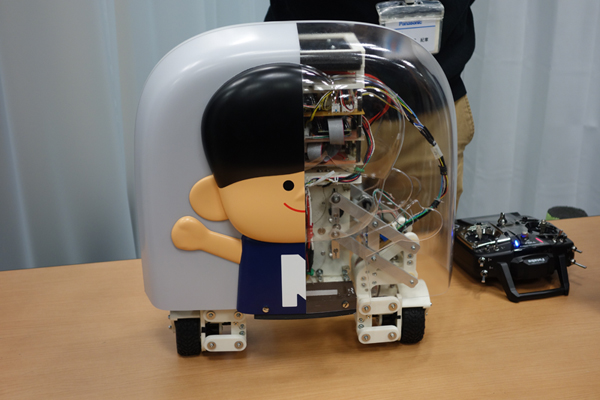
高精度制御による跳躍ロボット

-

振動を吸収するスタビライザによる撮影のデモ風景

パナソニックのロボット開発に向けた要素技術のデモの様子
そのほか、同社としては、さまざまな要素技術を、さまざまな分野の製品などに活用してきているということで、そうした技術を集め、ロボット向けとして開発や使い勝手の効率の向上を図っていくことで、今後のロボティクス開発の加速につなげたいとしている。
なお、Robotics Hub全体の人員規模は非公開とのことであるが、「ロボティクス活動を見てくれている社員としては、バーチャルに連携してくれている者も含めると、600~700名ほど」とのことで、今後も引き続き、社内外も多くの人の力を借りつつ、ロボット技術の発展を目指していきたいとしていた。














