本田技研工業(ホンダ)は11月14日、より幅広いユーザーの利用を可能とし、人との親和性を向上させた着座型パーソナルモビリティ「UNI-CUB β(ユニカブ ベータ)」を発表した(画像1~6)。「第43回東京モータショー2013」に出展され、会場では体験試乗も予定されている。

|

|

|
|
画像1(左):UNI-CUB β。 画像2(中):真正面から。 画像3(右):真横から |
||

|

|

|
|
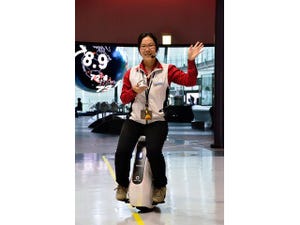
画像4(左):後方から。 画像5(中):UNI-CUB βに搭乗している様子。 画像6(右):UNI-CUB βに搭乗している様子を真横から |
||
2012年5月に発表された「UNI-CUB」(画像7)は、ASIMOに代表されるホンダのヒューマノイドロボット研究で開発されたバランス制御技術や、全方位駆動車輪機構「Honda Omni Traction Drive System」(画像8)により、着座して身体を傾けて体重移動するだけで、人の歩行のような前後左右や斜めへの動きを可能にしたパーソナルモビリティだ。人の行き交う場所にも適応するコンパクトなサイズで、着座型のために高所から周囲の歩行者を威圧する心配もない。オフィスや商業施設などの屋内空間での移動を可能としている。
2012年6月より実施されている日本科学未来館との共同実験において(画像9)、施設内での活用の可能性が検証されてきた。未来館のスタッフが館内移動用として活用するほか、来館者がUNI-CUBに乗車して施設内の展示物の見学を行うなど(画像10)、幅広い世代の人々が試乗し、その実験からさまざまなデータや利用者の声を収集し、それらを反映させ、今回の「UNI-CUB β」が開発された形だ。

|

|
|
画像7。初代UNI-CUB |
画像8。Honda Omni Traction Drive System |

|

|
|
画像9。未来館での実証実験の様子 |
画像10。未来館にて一般来場者が利用している様子 |
従来モデルと今回のβとの違いは、まず小型・軽量化が挙げられる(画像11・12)。従来モデルよりも、シート位置を低くなっており、軽量化も施されたことで、より幅広いユーザーが利用できるようになったという。また、デザインと素材の進化も図られた。「人との調和」、「空間との調和」をコンセプトに、人と機体の一体感が向上するようなデザインが採用されている(画像13・14)。また、機体には人が触れたときの感触や接触時の衝撃緩和のため、柔らかい素材が採用された。さらに、スタンド機能が追加されたことで、乗り降りのしやすさが向上している。また、静止状態でスタンドを立てることで、いすとして利用することも可能だ。

|

|
|
画像11・12。UNI-CUB(右)とUNI-CUB β(左)の外観比較 |
|

|

|
|
画像13・14。人と機体の一体感が向上するようなデザインが採用された |
|
今後は、さらにステップアップを図る予定で、有償レンタルをベースに外部の事業者にさまざまなシーンでの使用を図り、ビジネスとしての成立性を検証していくとしている。