宇宙航空研究開発機構(JAXA)は8月2日、小惑星探査機「はやぶさ2」に関する記者説明会を開催し、これまでに実施した科学観測の結果や、今後のスケジュールなどについて説明した。科学観測についてはまだ速報レベルではあるが、リュウグウ表面に水が見当たらないという予想外の結果も明らかになった。
なぜ水が見当たらないのか
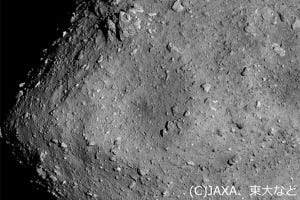
今回の会見の中で、最も意外だったのは「NIRS3(近赤外分光計)」の観測結果だ。リュウグウはC型の小惑星で、水や有機物が豊富にあると考えられていたのだが、これまで全表面の90%以上を観測したにも関わらず、水の存在が検出できなかったという。
-
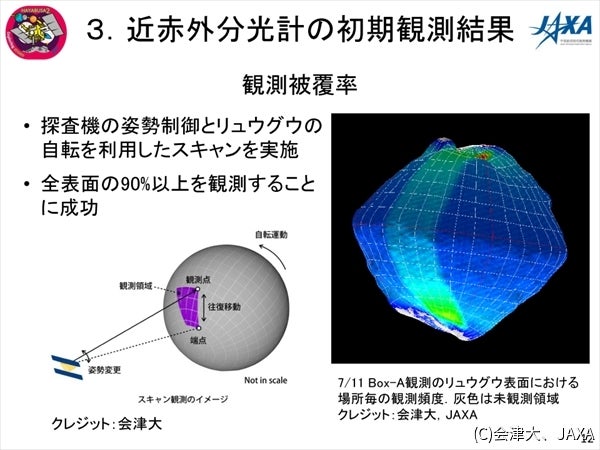
探査機の姿勢を変えることで、これまでに全表面の90%以上を観測。しかしほとんど水が検出できなかった (C)会津大、JAXA

水分子(H2O)や水酸基(OH)は、波長3μm付近の赤外線を吸収する性質があり、この性質を利用した観測装置がNIRS3だ。もしリュウグウ表面の鉱物に水分が含まれていれば、太陽光を反射したときに、その赤外線を吸収。反射光のスペクトルを見れば、この部分の強度が弱くなっているはずだ。
-

水分が多いマーチソン隕石(青線)では、赤外線の吸収が見られる。一方、水分が少ないアエンデ隕石(赤線)には、その落ち込みがない (C)東北大、JAXA

しかし結果は予想外だった。NIRS3担当の北里宏平氏(会津大学 コンピュータ理工学部 准教授)によれば、観測した範囲で水分量は「ほぼ0%」だったという。予想よりリュウグウが乾いていたわけだが、理由としては、最初から無かった(母天体で水分を含む鉱物が生成されなかった)説と、途中で無くなった(2次的な加熱による脱水を経験した)説が考えられるとのこと。
-

NIRS3担当の北里宏平氏(会津大学 コンピュータ理工学部 准教授)

もし後者であれば、地下にはまだ水が残っている可能性がある。太陽光の熱で蒸発したのであれば、その影響は深さ数cmレベルとのことで、インパクタで人工クレーターを作り、地下の鉱物を露出させれば、そのときに水が検出されるかもしれない。また、まだ極域が観測できていないため、そこで検出される可能性もある。いずれにしても、まだ初期観測の段階であり、今後の観測結果を待つ必要があるだろう。
ただ、本当に水が無かったとしても、落胆する必要は無いようだ。北里准教授は、「予想は外れたが、結果的に当たりと考えている」とコメント。「水が無くて、これだけ反射率が低いのは、隕石では見当たらない。我々が手にしたことが無いものが、今回のサンプルリターンで入手できると期待している」と述べた。
3種類の形状モデルを作成
LIDAR(レーザー高度計)は、パルス状のレーザーを発射し、反射して戻ってくるまでの時間を計測することで、探査機の高度(距離)を正確に測る装置。20kmも離れたホームポジションからでも、数m程度という精度の高さで調べることが可能である。
-

LIDAR担当の水野貴秀氏(JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授)

これまで、LIDARは問題無く動作しており、安定した観測を継続。観測点は赤道付近に偏っているものの、ほぼ全球を観測しており、観測データから形状モデルを作成した。このモデルは、画像データから作成したモデルともほぼ一致。LIDAR担当の水野貴秀氏(JAXA宇宙科学研究所 宇宙機応用工学研究系 准教授)は、「LIDARとカメラは相補関係。一致しているというのは、正しい観測ができている証拠」と評価する。
-

LIDARの観測データから作成した形状モデル (C)国立天文台、JAXAなど

LIDARの観測により、クレーター地形の特徴も分かってきた。7個のクレーターにおいて、深さと直径の比率を求めたところ、0.1~0.2程度であり、これまでに観測された小惑星や彗星と良く一致しているという。さらに、高さ5m前後の明瞭な縁を持つクレーターも見つかったが、これは初号機のイトカワでは見られなかった特徴だそうだ。
-

クレーター地形の計測結果。仮番号12のクレーターでは、約7mもの高さがある縁が見つかっている (C)国立天文台、JAXAなど
-

形状を測定したのはこの7個。ただ最大のクレーターは、データがまだ足りないということでこの中には入っていない (C)国立天文台、JAXAなど


また、ONC(光学航法カメラ)による画像データからも形状モデルを作成している。「Structure-from-Motion」(SfM)法と「Stereophotoclinometry」(SPC)法という、2つの異なる手法でそれぞれモデルを作成し、両者を比較。ほぼ一致したことから、手法の妥当性が確認できた。
-

2つの方法で、形状モデルを作成。どちらもステレオ視を利用したものだ (C)JAXA
-

各モデルを展開し、標高で色づけしたもの。赤道付近が高いことが分かる (C)JAXA、神戸大


-

SfMによるモデル (C)会津大、JAXA
-

SPCによるモデル (C)神戸大、JAXA
形状モデルを担当した平田成氏(会津大学 コンピュータ理工学部 上級准教授)は、「データとして形状を推定することで、地形の特徴を定量的に把握することできる」と述べる。形状モデルは随時最新の観測データからアップデートされており、今後、着陸地点の選定や、探査機の位置の推定などに活用されることになる。
-

形状モデル担当の平田成氏(会津大学 コンピュータ理工学部 上級准教授)
-

3Dプリンタで出力された形状モデル。会津大学が作成したのは左から2番目