「カメラ」と一言で言えば、我々は当たり前のようにデジタルカメラを想起する時代になった。ほんの20年前に遡ればこの言葉はカラーフィルムカメラを指したし、もう40年遡ればモノクロフィルムカメラだった。カメラの変遷は受光部の変遷でもあり、デジタル化をきっかけに受光部はフィルムからCCDに変わり、そしてCMOSになった。今こうして歴史を振り返るだけでも、カメラが永遠に今のままのデジタルカメラでありつづけるはずがないことは想像に難くないと思う。
そしてその次世代の「カメラ」はすでに実用化が始まっている。これまでの常識では、「カメラ」は画像を撮像するだけのデバイスだった。今それが変わりつつあるのだ。
センシングデバイスとしてのカメラ
カメラは、単純に画像を撮像するだけのデバイスから、センシングデバイスに変わりつつある。つまり、単なる2次元の情報を提供するカメラから、距離情報(奥行情報)や波長情報などを提供するカメラへと変化を遂げることが予測されている。そういった、新たな付加情報を提供するカメラをセンシングデバイスと呼んでいる。下の図を見て欲しい。

|
|
(出所:Yole Development) |
そんな「カメラ」から「センシングデバイス」へという大きな流れを作り出しているのが各CMOSセンサーメーカーであり、今現在が時代の転換点にいることが上記のYole Developmentの調査レポートにまとめられている。
つまり、これまで工業用のカメラを製造してきたメーカーは、前回、解説したように「工場の中から工場の外へ向けたBtoCエンベデッド・ビジョン市場」といった新たな市場を求めるか、カメラを製造するのではなくセンシングデバイスを製造するメーカーに変化することが求められる。再度繰り返すが、工業用カメラの市場は成熟期を迎えている、一般的な市場競争原理に照らすと、成熟期においては生き残った大規模な企業がさらなる「効率化」を追求することでますます大きく成長するが、そのスケール戦略に乗り遅れた企業は淘汰されるかニッチ市場で細々と生きていくしかない。

|
それに対して、「BtoCエンベデッド・ビジョン市場」も、「センシングデバイス市場」も、どちらも成長期をこれから迎えようとしている。これも一般的な市場競争原理に照らすと、多くのテクノロジーが導入期から成長期に移行することなく消えていくが、いったん成長期に突入すると市場参加者は誰もが2桁成長を果たす時代を迎えることになる。まさに「BtoCエンベデッド・ビジョン市場」、「センシングデバイス市場」は、成長期をこれから迎えようとしていると我々は考えている。
センシングデバイスの応用を考えると、例えば距離情報を得られることのメリットは、自動車、配達ロボット、ドローンの自動運転における衝突回避に有効活用できる。もしくは、ジェスチャー解析であったり、人物カウントや姿勢監視など、2次元から3次元という軸が増えることで多くの情報を取得することができる。さらに、波長情報を得ると対象物の成分を認識することができるようになるため、錠剤の種類を判別、果物の糖度を計測、リサイクル時の不純物の認識といった、こちらも2次元から波長という軸が増えるだけでより多くの情報を取得することができるようになる。
3次元カメラ
そうしたセンシングデバイスとしてのカメラの中でも、特に研究開発の盛んな分野が3次元カメラである。

|
|
さまざまな3次元撮像手法 (出所:日経エレクトロニクス 2014/5/26号) |
これら手法の中でも、比較的安価に製造することができ、専用CMOSによる組込デバイスとして小型化が可能なToF(Time of Flight)と呼ばれる手法は、特にここ数年で飛躍的に利用シーンを増やしている。ToFが実用化された著名なアプリケーションは、Microsoftの3Dカメラ「Kinect」である(正確には1世代目はパターン照射方式(light coding)で、2世代目がToF方式である)。ゲームデバイスとして大量生産され、低廉化が進み、一気に応用範囲が広がった。

|
|
距離画像センシングの変遷 (ToF以外の用途も含むことに注意) (出所:日経エレクトロニクス 2014/5/26号) |
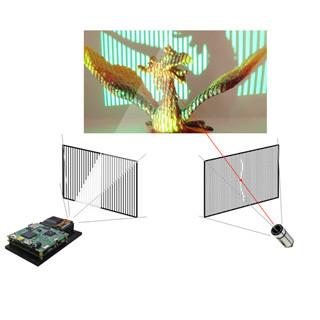
ToF技術は、自ら投光した光(LED/VCSEL/LDなど)が、対象物に反射して受光素子に戻るまでの時間を計測することで、光速cとの数値計算から距離を算出する手法である。

|
|
ToFの仕組み |
ToF用センサーはCMOSセンサーをベースとしているが、その構造にちょっとした工夫が施されている。1ピクセルの中に、2つのピクセルが0.5ピクセル、0.5ピクセルで同居していることを想像してほしい。そして、それらの各0.5ピクセルは上図の通りシャッター1、シャッター2といったタイミングでシャッターを開く。
ここでの目的は、反射光が戻ってくるまでのtを計測することであり、それが距離に比例するのである。どのようにtを計測するかというと、シャッター1とシャッター2に溜まる光量の割合(A:B)を計算すればよい。対象物が手前に異動するとtが短くなり反射光は上図の左に移動し、そうするとシャッター1に蓄積される光量Aが増え、シャッター2の光量Bが減少するので、A:Bの割合がtに比例し、そしてt自体は対象物の距離に比例するという考え方である。
このように、従来のCMOSセンサーに工夫を施すことでセンシングデバイスである3次元センサーとすることができる。
今回は、今後の「カメラ」から「センシングデバイス」という時代の変化を解説し、その中でも最も注目されている3次元センサーに着目した。そして、いくつも存在する3次元センサーの中でもToF技術を解説した。というのも、ToF技術は前回の号で解説した、今まさに隆起しようとしている「BtoCエンベデッド・ビジョン市場」に適したセンシングデバイスであるからだ。次号では、ToF技術によるエンベデッド・ビジョン市場での応用と、それに伴う課題について解説する。
著者紹介
村上慶(むらかみ けい)/株式会社リンクス 代表取締役
1996年4月、筑波大学入学後、在学中の1999年4月、オーストラリアのウロンゴン(Wollongong)大学に留学、工学部にてコンピュータ・サイエンスを学ぶ。2001年3月、筑波大学第三学群工学システム学類を卒業後、同年4月、株式会社リンクスに入社。主に自動車、航空宇宙の分野における高速フィードバック制御の開発支援ツールであるdSPACE(ディースペース、ドイツ)社製品の国内普及に従事し、国内の主要製品となる。2003年、同社取締役、2005年7月、同社代表取締役に就任。

同社代表取締役に就任後は、画像処理ソフトウエアHALCON(ハルコン、ドイツ)を国内シェアトップに成長させ、産業用カメラの世界的なリーディングカンパニーであるBasler(バスラ―、ドイツ)社と日本国内における総代理店契約を締結するなど、高度な技術レベルと高品質なサービスをバックボーンとした技術商社として確固たる地位を築く。次のビジネスの柱として2012年7月にエンベデッドシステム事業部を発足し、3S-SmartSoftware Solutions(スリーエス・スマート・ソフトウェア・ソリューションズ、ドイツ) 社の国内総代理店となる。