カーネギーメロン大学のロボティクス研究所(The Robotics Institute)は、ヒトの次の動きを予想することができるロボットのデモンストレーションを実施している。では、彼らはこのロボットを何のために開発しているのだろうか。そしてどのようなロボットなのだろうか。今回は、こんな話題について紹介したいと思う。
-

ヒューマンロボットコラボレーション(HRC)の実現に向けて開発が進む、ヒトの次の動きを予想するロボットとは?

ヒューマンロボットコラボレーション(HRC)とは?
まず、カーネギーメロン大学のロボティクス研究所は、このロボットを何のために開発しているのだろうか。
フォードなどの自動車をはじめ、製造業などの企業の製造ラインにおいては、自動化されたロボットが活躍している。そのロボットに対しては、大量生産のみならず、その製造ラインにカスタマイズされた能力が求められている。ではその"カスタマイズ"とは何だろうか。
数多くあるカスタマイズ性能の1つに、製造ラインに介入する人間とロボットによる、柔軟かつ安全なコラボレーションの確立が挙げられる。このコラボレーションを、HRC(Human Robot Collaboration)と呼ぶ。HRCの実現に向けては、ロボット工学はもちろんのこと、AIによる機械学習やヒューマンロボットインタラクションなどのさまざまな最先端のテクノロジーを駆使して、ヒトの動きや意図を予測したり、変化する環境に対応して入れ替わったりと、さまざまな人間の動きにも対応する必要があるのだ。
パートナーの行動を予測するロボットのデモンストレーションとは?
ではここからは、どのようなロボットなのかに迫ろう。開発チームは2022年10月、次のようなデモンストレーションを実施している。 それは、子供の知育玩具のような丸型・星型・十字型・丸型・ハート型などさまざまな型の穴が空いた木製の箱をロボットアームが保持し、人間がその型に合うブロックピースを箱の穴に入れるという、ある意味単純な作業。しかしこの作業は、HRCとしてはとても高度なのだ。というのも、人間がある形をしたブロックピースを選ぶと、ロボットは人間が作業しやすいように、その型の穴が開いている面を向けてくれる。人間がそのブロックピースを無作為に選んだとしても、ロボットはしっかりとその型に適した面を必ず向けてくれるのだ。
またこのデモンストレーションは、一人のユーザーだけに対応するのではなく、複数の異なるユーザーについても対応することが可能だし、ブロックをランダムな順序で配置しても順応することができるのだ。
-

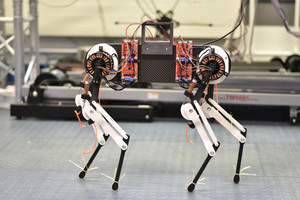
HRCの実現に向けたロボットのデモンストレーション(出典:カーネギーメロン大学)

このデモンステレーションの意味するところは、1つのワークスペースにおいて、ロボットが人の行動を予測して、効率よく、安全に、迅速に作業する手助けができることを意味するのだ。カーネギーメロン大学ロボティクス研究所では、これを"The integration of perception and action"(知覚と行動の統合)と呼んでいる。
普通、このようなロボットの行動を実現するためには、人間のさまざまな行動に適用できるように膨大なデータを収集し学習させる必要があるが、彼らは事前学習を最小限に抑える方法を見つけて採用しているというのだ。
いかがだっただろうか。このようなHRCが実現すれば、製造ラインでの人間同士の共同作業と同様、もしかしたらそれ以上に効率的かつ安全に作業ができることだろう。そして冒頭で述べたように、顧客に応じた製造ラインへのカスタマイズが実現されるに違いない。開発チームは最終的に、複数のロボットと複数の作業者が、同じワークスペースの中で安全・迅速・効率的に作業が行えるHRC実現への歩みを進めていくという。