カーネギーメロン大学のロボティクス研究所は、触覚センサを搭載したことにより布の枚数を認識してつかむことができるロボットを開発している。では、このロボットは何に役立つのだろうか。また、どのような点が優れているのだろうか。今回は、こんな話題について紹介したいと思う。
将来の家事お助けロボット開発に期待!
では、そのロボットとはどのようなものだろうか。ロボット自体にはアームとグリップがあり、この2つのグリップ部分で布を挟んでつかむことができるという。
-
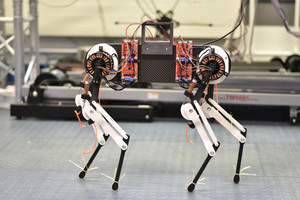
ロボティクス研究所が開発を進めるロボット(出典:カーネギーメロン大学)

布を把持することを目的とした従来のロボットは、対象の認識を視覚センサに依存しているものが多かった。しかし、視覚センサを利用して布を1枚もしくは複数枚つかむ動作を実現するには、非常に複雑なシステムが必要になるという課題がある。そこでカーネギーメロン大学の開発チームは、触覚センサの活用を提案したのだが、タオルのような不定形の物体について、触覚から収集されるデータを定量化するのが困難であるという課題にぶつかったという。
そこで彼らはMeta AIと共同で、触覚センサ「ReSkin」を開発。そのセンサをロボットののグリップ部分に設置した。このReSkinは、大きく分けて磁性エラストマ・磁力計・電子回路で構成されているタッチセンサ。柔らかい磁性エラストマに3軸いずれかの圧力が加わるとその部分に磁場が発生し、磁力計を通じてセンシングされるという仕組みだ。ReSkinは厚さ2~3mm程度で、5000回のインタラクションに耐えることができるという。またセンシングに関する精度については、400Hzの時間分解能と1mmの空間分解能を持っているとのこと。このような触覚センサを搭載することで、1枚から複数まで異なる布の把持に成功しているのだ。
-
磁性エラストマを採用することで柔らかい不定形物の把持も可能になった触覚センサ「ReSkin」(出典:Meta AI)

ではこのロボットは、何に役立つのだろうか。実は、触覚センサを搭載したロボットは一般的に、硬いものをつかむことはできるが、布のような柔らかいものをつかむのは難しいという。これは、布はロボットがつかむと柔らかく変形するため、つかむ位置の調整が必要な上、センサの計測値が定量化できないことが理由だ。しかし今回のケースでは、まず触覚センサによって布の枚数を推定し、次にロボットのアーム部分を調整する、という動作を何度も繰り返すことで、布の枚数を数える作業を学習させた。これにより、布のような柔らかくてデリケートなものでもロボットが取り扱えるようにしたのだ。
いかがだっただろうか。彼らによると、布を数えられるこのロボットを使えば、将来的には、洗濯物をたたむなどの家事を手伝ってくれるようになるかもしれないとしている。とても楽しみだ。