人が「歩く」という動作は、多くの人が当たり前にできていることのため、一見すると簡単な動作のように思えるが、五感からの情報を脳が処理し、それを踏まえた次に動かすべき身体動作の指令を脳から筋肉や神経系へ伝達、それを受けた筋肉などが指令を受けて、指示に沿って動くという神経系のやり取りに加え、重力などを加味してバランスを保って移動するという力学的なダイナミクスも加わるという実は複雑なメカニズムが介在するものである。
そうした歩くといった動作(歩行)を物理現象として捉え、重力による振り子運動を活用することで、モーターなどの動力やコンピュータによる制御を用いずとも歩き続けることができる「受動歩行」の活用を研究してきたのが、名古屋工業大学(名工大)機械工学プログラムの佐野明人 教授である。
-

右が名工大の佐野教授、左が佐野教授の右腕ともいえる名古屋市総合リハビリテーション事業団の鈴木氏。二人の間にあるのが下半身だけの受動歩行ロボット。「稲穂型歩行支援機」を生み出すきっかけとなった新原理のヒントはこの受動歩行ロボットの股関節部のベージュの部分にあった

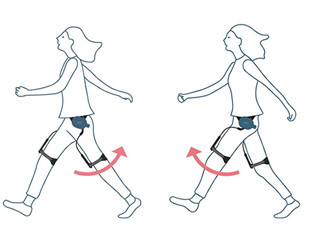
佐野教授は今仙技術研究所と協力して、この受動歩行の技術を活用して、歩きが弱った人の脚の振り出しをアシストする無動力の歩行支援機「ACSIVE」を2014年に製品化。2017年にはACSIVEを進化させた健常者でも利用できる無動力歩行アシスト「aLQ by ACSIVE」も製品化してきた。
10年越しに新原理を発見
ACSIVEの機構を単純に言ってしまえば、コイルばねとカム機構を組み合わせて、足を後ろに引いた際の力をばねに蓄え、前に移動する動きの際に蓄えたばねの力を加えることで足を前に出すことを補助するというものである。しかし、その場合、「ACSIVEを使ってもらった際、多くの人からばねの力(アシストする力)を強くしてもらいたいという話があった」(佐野教授)という。直感的に、ばねの力で足を出す力を補助してくれるというイメージが利用者の中であることから、もっとスムーズに足を出すためにはばねの力が強い方が良いといった考えになりやすかったのではないかと佐野教授は分析する。
このばねとカムの組み合わせは、ACSIVEを生み出す前に開発された受動歩行ロボットで採用された機構で、足の動きをサポートするために有効なものと長年考えられてきたという。
-

受動歩行ロボットのばねとカム機構部分

しかし、長年、さまざまな講演や発表を通して、その下半身だけの受動歩行ロボットの動画を見ていた佐野教授は、受動歩行ロボットの腰部に設置し、脚が動いた際にその反動でカムがぶれない役目を持った重りが、歩くたびに上下する動きに意味があるのではないかと考えるに至り、調査を開始。このわずかな上下運動が実は受動歩行に重要な役割を果たしていることを突き止めたという。2014年のACSIVEの製品化から実に10年の歳月を経て、受動歩行に関する新たな原理が見つかったこととなる。
-

受動歩行ロボットの腰部に設置し、脚が動いた際にその反動でカムがぶれないための部分。中に数百gの重りが入れられている

歩くという動作と密接なかかわりを持つ上下運動
歩行に上下運動が伴うというのは、実際に歩いてみると腰の高さが一定ではないために直感的に理解できる動きであるといえるだろう。では、この上下運動を歩行の支援に使えないか? そう考えた佐野教授らの研究チームは、上下運動で生じる重りが揺れる運動を本人に伝達する仕組みとして、稲穂の如くしなやかな円弧状のピアノ線を介して脚と連動させた「稲穂型歩行支援機」を考案したという。
-

開発された「稲穂型歩行支援機」。一見するとベルトのようだが、実際は腰から離れた(浮いた)形で使用される

具体的には、腰の後方に背中からある程度の距離を空けて重り(慣性体)を搭載するハードポイントを用意。腰部にはそのハードポイントを止めるアタッチメント部がベルトやズボンに差し込む形で用意され、かつ膝部のバンドとたわんだ状態のピアノ線を結ぶ役割を担っている。この腰部のアタッチメントと重りのハードポイント部の間は体形に応じて伸び縮みが可能なスライド機構でつながっており、ヨー軸/ロール軸の回転機構を装備しているほか、アタッチメント部にピッチ軸が備えられている。


肝ともいえる重りを取り付けるハードポイント部。佐野教授らの試験ではちょうどよい重さのモバイルバッテリーのサイズに合わせて作られた




重り部分から腰のアタッチメント部分まではスライド機構で調整が可能。腰に装着するアタッチメント部分はベルトやズボンに差し込むだけ。ピアノ線については、長さ、太さ、角度の調整が可能だという


この構造により、歩き始めると重りが上下に揺れ(前に進む際に沈んだ位置から浮き上がる位置に移動)、その振動に併せてピアノ線がたわみ、元に戻ろうとする動的な動きが生み出されることとなる。ちなみに重りは数百gほどが適当で、歩いていると重りの負荷を感じない。試作機ではモバイルバッテリーがちょうどよい重さとして採用されたという(重さで言えば小型のペットボトルとかでも良い。あくまで重さが重要であり、電気を動力に活用するといったことではない点に注意が必要である)。
-

実際に腰に取り付けた状態。身体に触れているのは腰のアタッチメント部分のみで、それ以外の部分は浮いている

-

ピアノ線を膝上と腰でつないだ状態。この稲穂が垂れるようなたわみが意識せずに歩行をアシストしてくれるというポイントの1つとなるという。受動歩行ロボットのコイルばねとカム機構をよりシンプルにしている

この動的な動きは、主体者である歩行者の動きに沿ったもので、稲穂型歩行支援機自体はその歩行者との相互作用に受動的に介在するだけのものであり、かつ平地ではその揺れもほとんど感じない程度のわずかなものだという(坂道や階段の下りでは大きくなる)。重りの上下運動は一定の歩行リズムを刻むための手助けとなり、テンポよく歩けるようになる。さらに、歩きやすい状況、いわゆる足が上がって軽やかな足取りという表現を自然と実現できるようになる。しかも、坂道や階段の上り下りも楽である。実際に何人かが参加する形でテストしてもらった際にも、「アシスト力を強くしてくれ」という要望はほぼ出なかったという。佐野教授の見立てとしては「装置が背中から離れた状態で、そこに意識が向くかというと、どちらかというと自分の歩容(歩いている様子)に意識が向いて、装置が揺れていることすら忘れるような気がしている」という。
また「こんな弱い力で(支援できるということは)、普通は考えにくい。レバレッジが効いている」(佐野教授)とのことで、モーターやバッテリーといった力任せでの技術ではなく、弱い力でもレバレッジを効かせることで、人の動きを活性化することができる点を最大の特徴と表現。この原理の発見について、「装置だけで生み出した効果ではなく、人間の作用を引き出した結果」であり、人間が歩くという行為は、相互作用が結集したものであり、その作用のチャンネルが多数にあり、そこに稲穂型歩行支援機がうまく入り込んで人の作用を引き出すことで、意識せずに歩行の支援を実現しているのではないか、としつつも、なぜその作用をうまく引き出しているかは、まだ完全には分かっていないとするが、人が歩く、という大前提のベースラインに沿っているからこそ、違和感を生じさせない機構となっているとの見方を示す。
自分の力で歩く楽しさを支援
稲穂型歩行支援機は、歩く人そのものの歩き方が極端に変わることもなく、自然と自分の歩き方を支援してくれるために、自分で歩いているという意識を強めてくれる存在となりうる。「ウォーキングイベントとか、一駅分くらいの長い距離を歩いて、その帰り道によく歩けたなぁ、といった思いがでる。しっかり歩けたという経験は、まだまだ年をとっても動けるという自信につながる。障害を持つ人も、高齢の人も、意外に歩けたという気持ちを持てるようになる。こうした、普段、なかなか歩こうと思わない距離をしっかりと自分の力で歩けたと思えるようになるのは1つの価値になるのではないか」と、なんらかの力で強制的に出しにくい足を前に出してもらうという動きとは異なる優しい動きがもたらす価値を佐野教授は語る。
また、開発に当たってはACSIVE時代から協力してきた名古屋市総合リハビリテーション事業団 企画研究局企画研究部 主幹(ロボット等開発・普及)の鈴木光久氏は「上下運動のテンポということで、メトロノーム的な存在と思われるが、オーケストラの指揮者といったイメージの方が近いかもしれない。さまざまな感覚や筋骨格が複雑に作用して歩行がなされていく中で、稲穂型歩行支援機がうまく指揮を執ってくれることで、長時間にわたる歩行を可能となる。しかも指揮者の指示に身体が従うというのではなく、身体から離れている場所にあるからこそ、あくまで指揮者が媒体という立場で、オーケストラ(身体)が自発的に動いているという印象」だと、稲穂型歩行支援機と歩行者の関係性を表現。“歩く”というライブを歩行者と稲穂型歩行支援機がセッションを通じて互いに連携していくことで、それぞれの個々の力が相乗的に伸びて、歩きやすい環境が構築できるのではないかと、あくまで稲穂型歩行支援機が主の存在ではなく、歩行者に寄り添う存在であるとする。
より多くの人に歩く楽しさを感じてもらいたい
佐野教授の考えとしては、まずはこの新原理を多くの人に体験してもらいたいという思いが強いという。そのため、商品化以前に、そういった興味を持ってくれる人が増えてくれることを目指すとのことで、興味をもってくれた人からの問い合わせなどに真摯に対応していきたいという。そうした体験を通して、大規模な体験会の開催や製品化を支援する企業・団体との連携など、新たなつながりの誕生への期待を述べる。
また、鈴木氏は「歩行支援機のメーカーの人に試着してもらった際、何も装着感を感じないという返事をもらった。開発する側としては、本当に装用感のないものを目指してきたので、その感想はまさに狙った通りのものでうれしいもの。現代の人は眼鏡をかけるが、装着していても違和感を感じることは少ない。そうした身に着けていても、着けていないくらいの存在になれれば良い」と、あくまで人に寄り添う自然な存在となることを目指したいとする。
人工知能(AI)の活用が社会に変革をもたらすと言われるようになってきた現在だが、そうした中にあって、人間の感覚に作用し歩行を楽しめる稲穂型歩行支援機は、歩くという行為が失われない限り、人間が人間であるための重要な機構となる可能性が考えられるという。また、そういった発想から、歩行支援以外のデバイスも生み出される可能性もある。佐野教授は、「機械的な作用が加わることで、人間のポテンシャルが変わってくる。こうした仕組みが分かってくると、人間中心のものづくりが今後、もっと求められる時代になっていく可能性もある。これまでは機械単体で性能がすごいという話が多かったが、人間に寄り添って使われる機械が重要だという概念が広がっていく。そうした概念は必ずしもハイテクが必要というわけではない。稲穂型歩行支援機もローテクだが、そこに腰の複雑な動きを許容する自由度の高さを持たせることで、人と機械のハーモニーが生み出され、歩くことを楽しむという価値を生み出すことにつながることが期待できるようになった」と、今回発見された原理、そしてそれを活用することで生み出された技術が、人間らしく生きるという新しい側面の価値にもつながっていく可能性を強調する。
機械が人間の持つポテンシャルを自然に引き出すことを可能とした稲穂型歩行支援機。歩行という行為は人間の根源的な行動の1つでもあり、いつまでも健康でありたいという願いを体現する存在でもあるだろう。装着していることを意識せずに、そうした歩行を支援し、歩くことを楽しくする新たな原理に基づく技術であり、佐野教授もまだまだ進化の余地があるとする。まだ稲穂型歩行支援機は、佐野教授や鈴木氏が使うものを含め、数台程度の試作段階に留まっているというが、そうした原理の探求に併せて、どのように進化していくのか、今後の動きが注目される。
-

佐野教授と鈴木氏に稲穂型歩行支援機を装着してもらった。浮いているので、固定されている感など、身体になにかまとわりついている感覚はほぼ感じられないという