東京大学(東大)は6月26日、ヒトの皮膚細胞から作製される「培養皮膚」を利用し、細胞由来の生きた皮膚を備えた顔型のロボットを開発したと発表した。
同成果は、東大大学院 情報理工学系研究科の竹内昌治教授、同・聶銘昊講師、同・小田悠加特任助教、同・河井理雄 短時間勤務有期雇用教職員(現・米・ハーバード大学大学院生)らの研究チームによるもの。詳細は、化学や工学なども含めた物理学全般を扱う学際的な学術誌「Cell reports physical science」に掲載された。
-

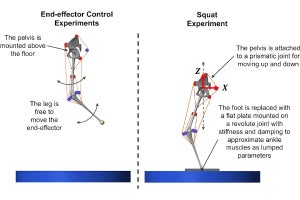
生きた皮膚を持つ顔型構造体(左)と笑う顔ロボット(右)(出所:東大プレスリリースPDF)

現在のヒューマノイドロボットは、ヒトと同等の柔らかさのある肌を実現するため、シリコンゴムが利用されているが、さらにヒューマノイドロボットにヒトと同等の機能を持たせようとした場合、皮膚に自己修復機能や触覚や温覚・冷覚などのセンシング機能、発汗による廃熱機能などを備える必要があり、その課題はまだ解決されていないという。
そうした中、ヒトの皮膚細胞から作られる培養皮膚をロボット用スキンにするというアプローチのもと、生きている皮膚組織で被覆した指型ロボットなどを開発し、上述の課題の解決を目指しているのが研究チーム。まるで、金属製のエンドスケルトンの上に生きた細胞を備えることでヒトにしか見えない外見を備えるという、映画「ターミネーター」のような技術が実現しつつあるのである。
-

今回の研究のコンセプト図。人体の皮膚支帯構造を模倣して、ロボットに培養皮膚をスムーズに接着するアンカリング手法が開発された(出所:東大プレスリリースPDF)

皮膚組織をロボットの被覆素材にしようとした時の難しさは、同組織をロボットにスムーズに固定するのが容易ではなく、その方法を工夫する必要がある点だという。ヒトの皮膚の場合、その下部にある筋肉との間で滑ってしまうようなことはない。つまり、皮膚は皮下組織とスムーズに面で接着されている。これまでの研究では、生体組織を人工物に固定する際は突起上のアンカー構造を用いて組織の端点のみを引っ掛ける構造が採用されてきた。しかし、突起が突き出る形状のアンカー構造はロボットのスムーズな見た目を阻害し、動作において干渉を発生させてしまう可能性があるという課題を抱えていた。
-

皮膚に被覆された顔型構造体の作成プロセスと画像(出所:東大プレスリリースPDF)

人体においては、コラーゲンを主成分とする網目状の繊維構造の「皮膚支帯」が皮下組織に存在し、皮膚組織の皮下組織(筋膜または骨)への固定において重要な役割を果たしている。また、この組織は筋肉の動きの皮膚への伝達にも役立っており、特に顔においては表情筋によるスムーズな表情の形成に貢献しているという。そこで研究チームは今回、その皮膚支帯から着想を得て、生きた培養皮膚に覆われた顔型の構造体を作製することにしたとする。
-

皮膚に被覆された顔型ロボットの動作(出所:東大プレスリリースPDF)

今回の研究では、人工物をV字に貫通する穴の内部で皮膚組織をゲル化させて固定する「穴型アンカー構造」が開発されると共に、それを用いて、生きた培養皮膚に覆われた顔型の構造体が作製された。なお、培養皮膚は生体の皮膚と同様に、真皮細胞とコラーゲンからなる「真皮層」と、内部組織の水分量を保ち周囲の有害物質を通さないバリア機能を持つ「表皮層」の2層構造となっているという。
また、アンカー構造による皮膚組織への動力伝達のデモンストレーションとして、モーターの動力が穴型アンカーを介して皮膚に伝達されることで笑うことができる顔型ロボットも開発されたとした。
今回の研究成果は、ヒトのような見た目と能力を持つソフトロボットの開発に加え、シワの形成や表情の生理学の解明、化粧品開発や薬剤効能解析のモデル、移植素材としての活用など医療分野、環境に優しい生体素材を用いた人工物の製造分野への活用・発展が期待されるとしている。