世界初の民間による月面着陸に成功したのは、米Intuitive Machines(IM)だ。これはわずか2カ月前の出来事であるので記憶に新しいが、その次のミッションも2024年内に実施される予定で、日本のダイモンが開発する超小型ローバー「YAOKI」の搭載が決まっている。SPEXAのブースでは、YAOKIの最新情報を知ることができた。
-
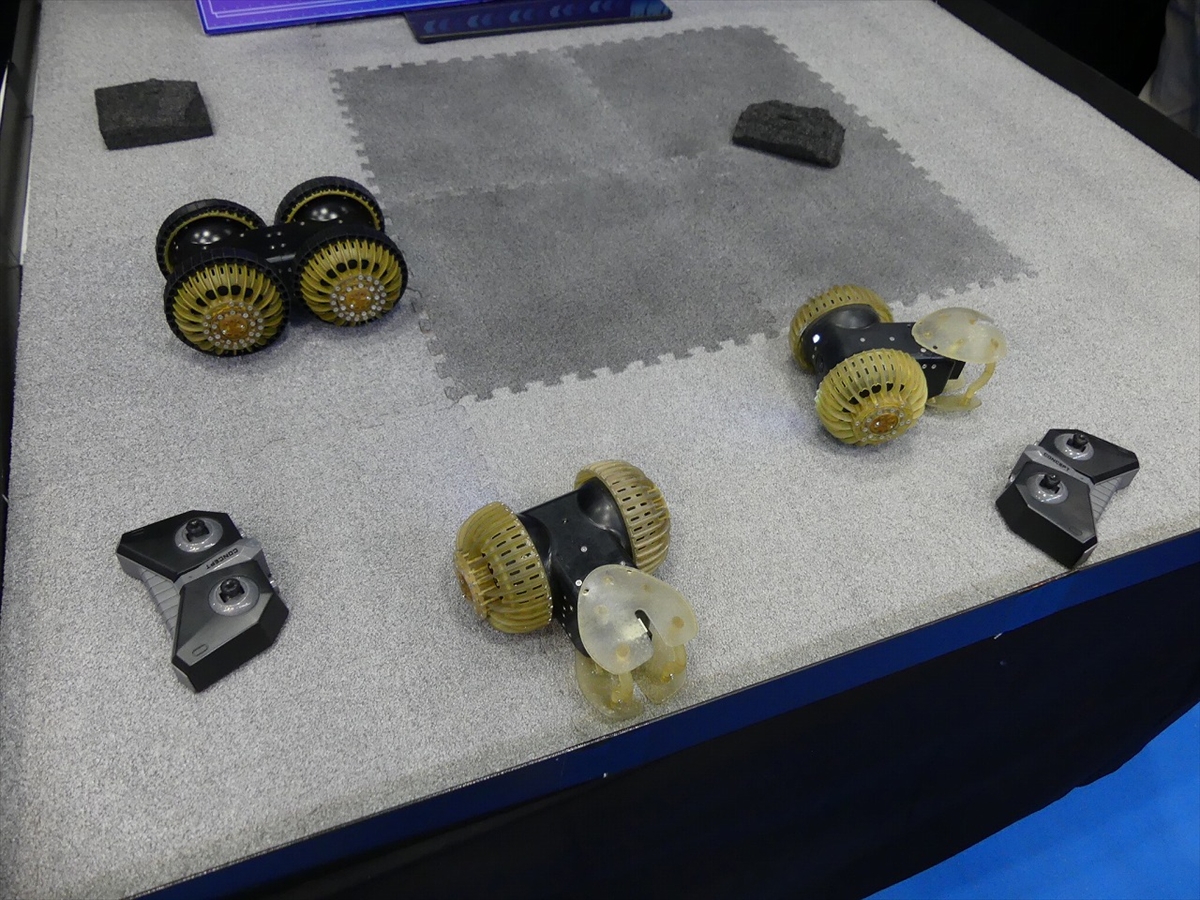
ブースには「YAOKI」の操縦体験コーナーも。左上にある見慣れない機体は……?

YAOKIが搭載されるのは、IMが開発したランダー「Nova-C」である。Nova-Cには6本の着陸脚があり、YAOKIの放出機構が設置されるのは、その付け根の中。1回目のミッションでは、着陸には成功したものの、Nova-Cは横倒しになってしまった。次回は対策してくるだろうが、もしまた転倒したとしても、この設置場所なら分離できる可能性が高そうだ。
-
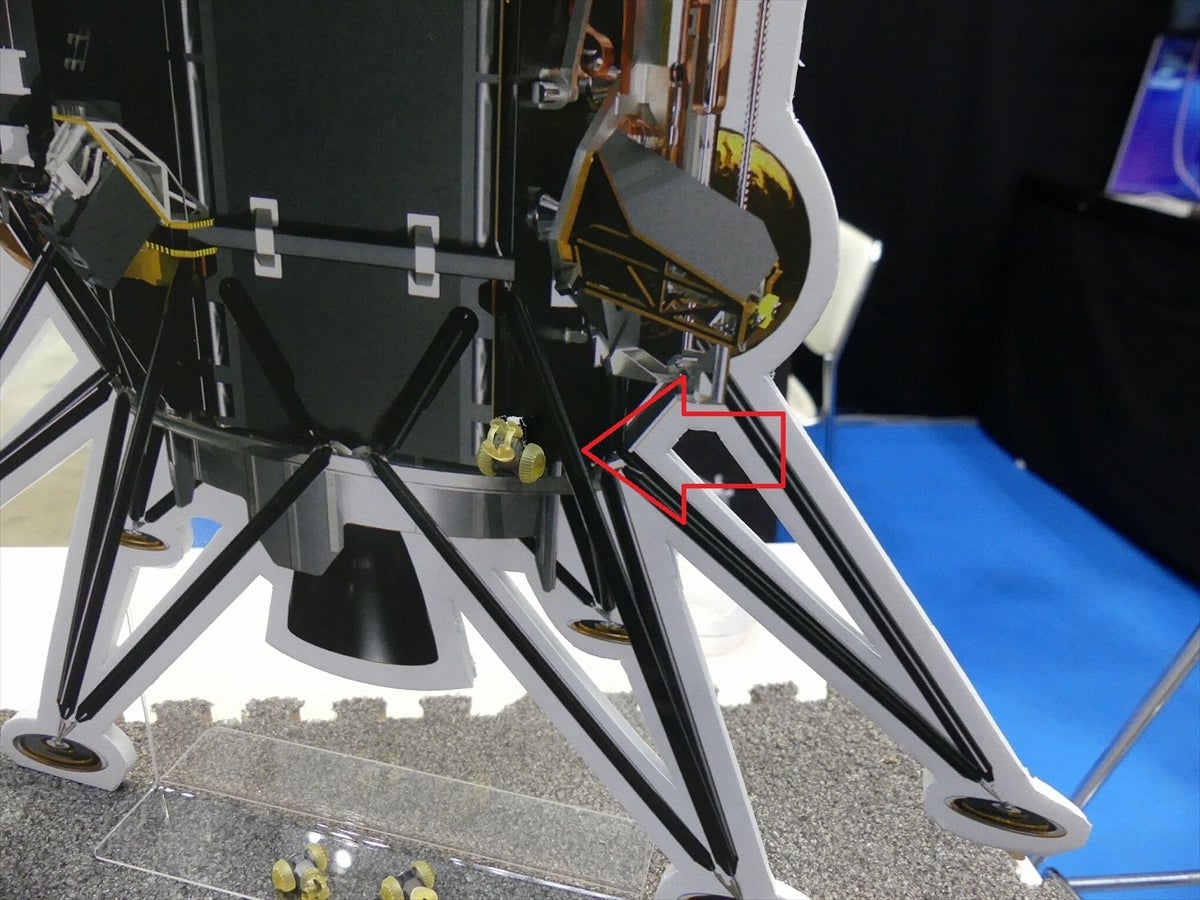
YAOKIのミニ模型が、ランダーへの設置場所を示している(赤矢印)

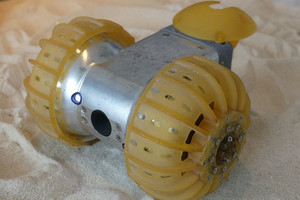
YAOKIを開発する同社の中島紳一郎 代表取締役によれば、月面の重力を再現する落下装置を開発し、YAOKIの走行試験を繰り返し実施。実際に1/6Gで走らせて初めて分かった課題もあり、車輪の形状などを改良したそうだ。以前のYAOKIと比較してみると、車輪の羽根の密度が大幅に増えていることが分かる。
-

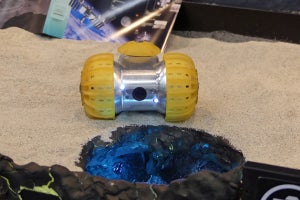
こちらは2022年の国際宇宙産業展で展示されていたYAOKI

-

最新のフライトモデル。車輪の羽根のほか、尻尾の形状も違う

月面の環境試験で難しいのは、この重力だ。真空や熱なら再現しやすいが、地上での走行ではどうしても1Gになってしまい、1/6Gとは挙動が変わる。今回開発した装置は、わずかにブレーキをかけつつ落下させることで、月面の重力を再現。実験時間は落下中のわずか1秒だが、実験サービスとしての提供も検討しているという。
また、YAOKIは2輪型のローバーであるが、4輪型の兄弟機も出展。2輪型より走破性能が向上しており、車輪直径は8cmながら、最高5cmまでの段差を乗り越えることが可能だ。天井裏の点検など、地上での活用が考えられているが、月面探査にも利用するとのことで、2025年には別のランダーに2輪型と4輪型を搭載する計画もあるそうだ。
-
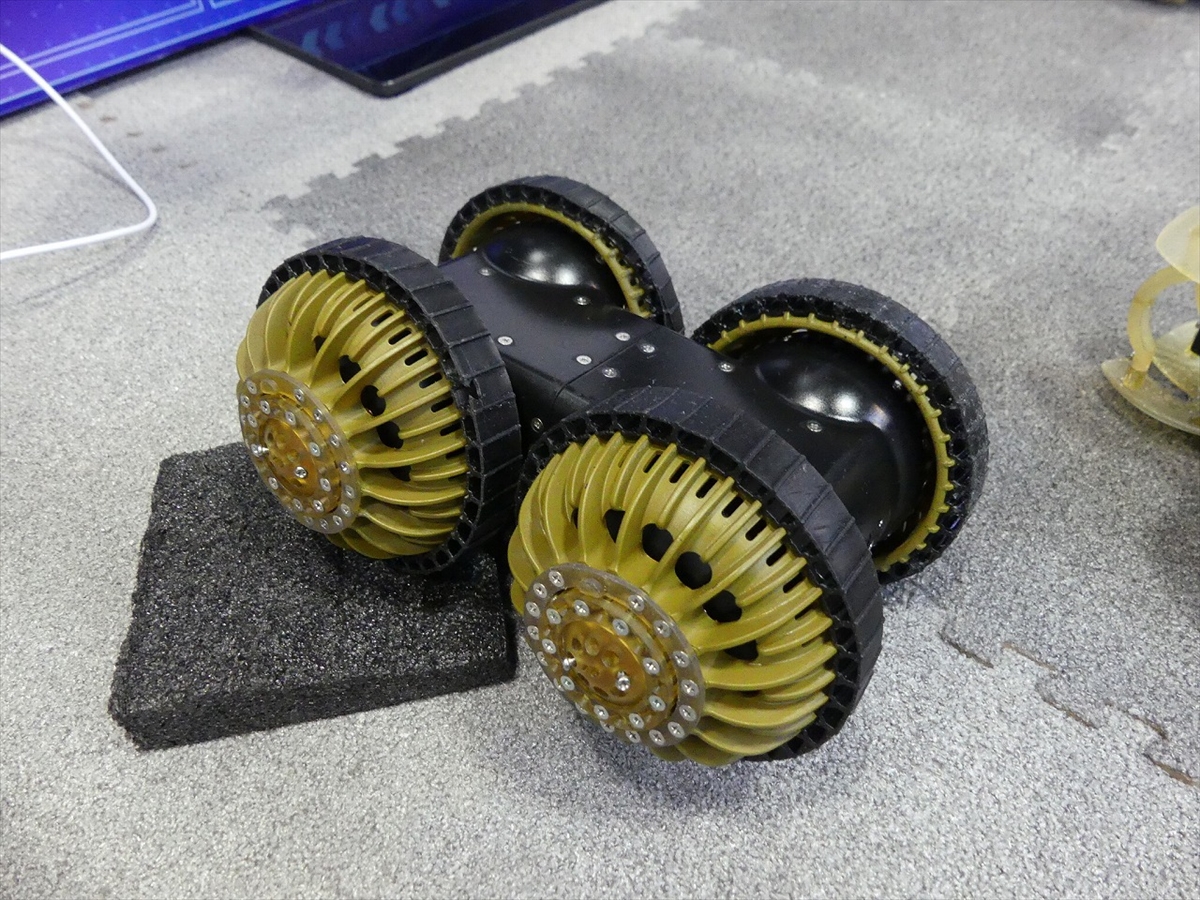
4輪型ならば、車軸の位置より高い段差も乗り越えられる

-
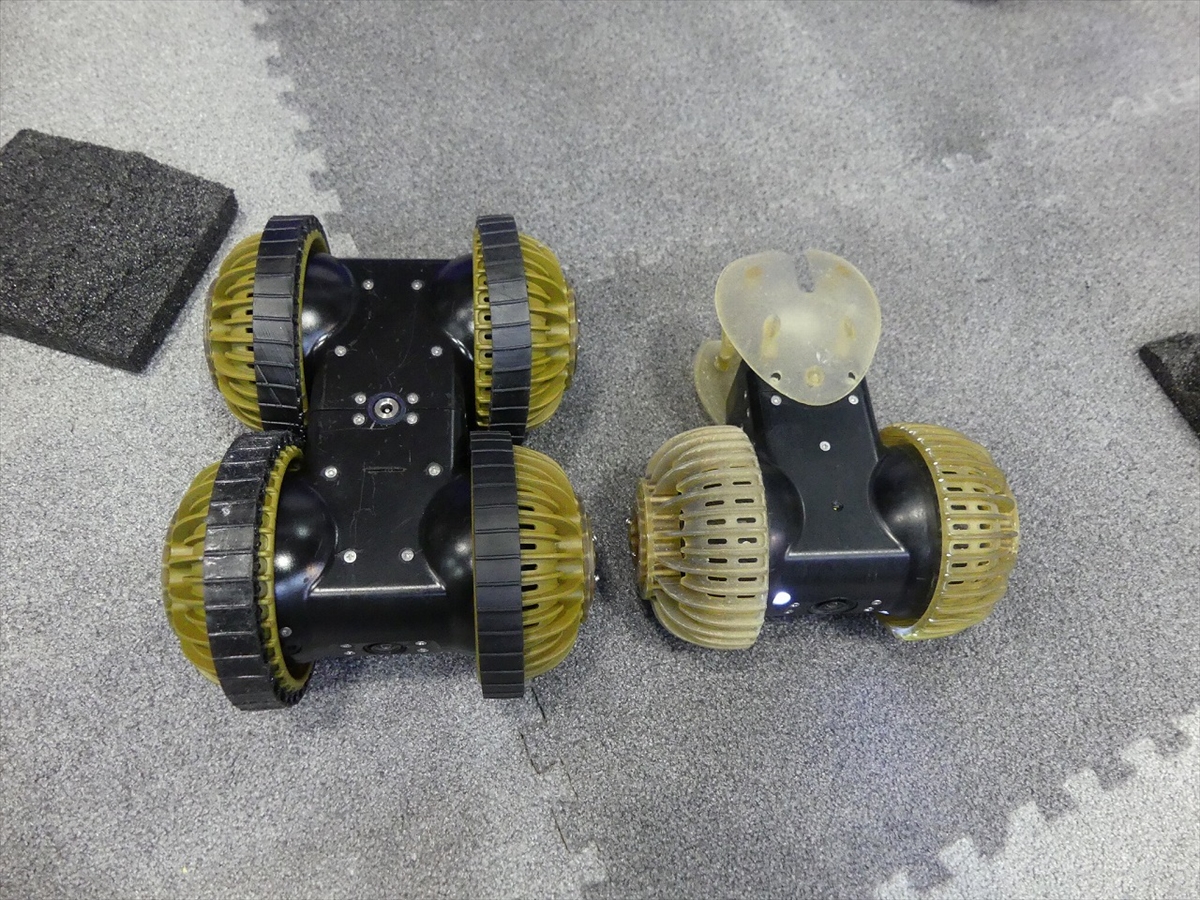
2輪型の前部を2つ並べた形なので、サイズ感は近い