電気通信大学(電通大)は12月27日、動物の視物質「ロドプシン」と同様の視覚機能と高い安定性を持つタンパク質を利用して、ヒトの目のように「錯視」する機能を持つ視覚ニューロン素子を開発し、画像の輪郭検出と明暗錯視検出を実現したことを発表した。
同成果は、電通大 基盤理工学専攻の岡田佳子特命教授、深澤光大学院生(研究当時)の研究チームによるもの。詳細は、米国化学会が刊行するナノサイエンスとナノテクノロジーの全般を扱う学術誌「Nano Letters」に掲載された。
ヒトの目で光を感知する視細胞は、光刺激によって興奮すると同時に隣接した細胞を抑制する仕組みの「側抑制」を有する。抑制する領域が興奮する領域を取り囲むようにして1つのニューロン(網膜神経節細胞)に情報を送ることから、中心と周辺がバランスを取るような同心円状の応答領域「受容野」を構成している。側抑制は、強い刺激をより強く、弱い刺激をより弱くするメカニズムであり、輪郭を強調して効率的に物体を認識する働きをすることがわかっている。
脳の神経ネットワークを模したニューロモーフィックの立場から、人工視覚ニューロン素子の実現が求められている。しかし、高度なプログラミングと演算回路やメモリを備えた複雑な回路構成が必要で、ヒトの目のように省エネルギーや小型化などの要求を満たせていないのが現状だという。
そうした中、視覚デバイス実現のため、半導体に替わる新しい材料として注目を集めているのが「バクテリオロドプシン」(bR)というタンパク質だという。動物の視物質「ロドプシン」と同様の視覚機能と高い安定性を持つスマートマテリアルとして、人工網膜や視覚センサに適用されてきており、研究チームも今回、bRだけを用いて、網膜神経節細胞の応答を模倣した視覚ニューロン素子を実現することにしたという。
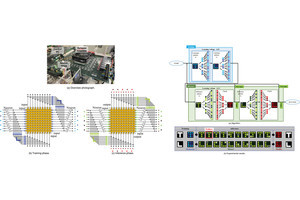
網膜神経節細胞の受容野は、中心と周辺領域が同心円状に配置された構造を持つことが、これは「DOG(Difference of Gaussian)関数」によって近似することが可能であり、DOG関数を2値に簡略化すると、興奮領域と抑制領域がそれぞれ円形とドーナツ型になる。今回の研究では、透明電極上にbRをそれぞれの形に成膜して向かい合わせ、電子部品を1つも使わない2値化DOGフィルターの「bR-DOGフィルター」が構成された。
-

(a)DOG関数および2値化DOG関数の1次元および2次元形状(挿入図)。(b)2値化bR-DOGフィルターの構造図 (出所:電通大プレスリリースPDF)

半導体との相違点は、bR自身がプロトンポンプという光合成機能と、畳み込みという視覚機能を持っている点だという。そのため、外部電源が不要、演算回路やソフトウェアを使わずに畳み込み画像が得られるとしており、bR-DOGフィルターに画像を走査するだけでデジタル画像処理と同様の輪郭検出結果が得られたという。
-

画像の輪郭検出結果。(a)デジタル入力画像(上)とbRフィルターへのプロジェクター投影画像(下)。(b)bRフィルター走査画像(上)とゼロ交差点を抽出した輪郭検出結果(下)。(c)デジタル処理画像(上)とゼロ交差点を抽出した輪郭検出結果(下) (出所:電通大プレスリリースPDF)

「シュブルール錯視」は、隣接した暗い面の境界が実際より暗く、明るい面の境界が実際より明るく見える錯視として知られており、bR-DOGフィルターによる実験結果では、隣接した面の境界に明暗の線がはっきりと出力され、明暗の出力比が1:3くらいに非対称であることが確認されたとする。コンピュータシミュレーションでも境界の明暗線は出力されるが、明暗の出力が対称になっていて実験結果と合わないという。ちなみに、ネコのX型網膜神経節細胞に光バーを走査すると正負の応答が非対称(およそ1:3)になるとする。その理由は、霊長類のX型網膜神経節細胞の応答時間が中心より周辺領域の方が遅いためで、遅れを考慮した計算機モデルでも非対称が確認されているとした。このことから、bR-DOGフィルターは単純化しているにも関わらず、神経節細胞の中心周辺間の応答遅延までも忠実に再現した視覚ニューロン素子であることが実証されたとしている。
-

明暗錯視検出結果。(a)シュブルール錯視画像と出力波形。(b)bRフィルター走査画像と光電流出力波形。(c)デジタル処理画像と出力波形 (出所:電通大プレスリリースPDF)

なお、生物から「智恵」と「もの」を借りた素子は、高度なプログラミングや複雑な回路を必要としないため、画像処理における計算負荷や消費電力の低減に貢献する環境に優しいハードウェアといえる。視覚ニューロンの応答を忠実に再現するので、ロボットビジョンなどへの実装だけでなく、集積回路上の人工視覚システムの実現をめざす次世代AI分野に新たな方向性を与えることが期待されるとしている。