日鉄エンジニアリング、三菱電機、モーションリブ、慶應義塾大学(慶大)の4者は、高度な力覚の必要な作業を可能とする慶大が開発した技術「リアルハプティクス」を搭載した6自由度パラレルリンクロボット(ヘキサロボット)を開発したと発表した。
開発されたヘキサロボットの特徴
今回開発したヘキサロボットの最大の特徴は、遠隔操作での高度な力覚の必要な作業が可能になる点が挙げられる。慶大が発明した、アクチュエータの力加減を自在に制御することができる力触覚伝送技術であるリアルハプティクスを活用することで、力センサレスで力触覚を伴う遠隔操作を可能としたとのことで、産業用ロボットが普及する中でも依然として人間の手によって行う必要があった非定型作業を、ロボットに代替させることができるようになるとしている。
日鉄エンジニアリングと三菱電機の技術が詰まったヘキサロボットの構成
具体的にこのヘキサロボットを構成しているのは、日鉄エンジニアリングが開発したリンク構造のアームと三菱電機の「MELSERVOJ5シリーズ」のサーボアンプとサーボモータ。また、三菱電機の「MELSEC iQ-Rシリーズ」のモーションユニットによるリアルタイム制御も実装されており、繊細で高応答な位置・速度・力といったモーション制御が可能で、人間の手首のような動きを実現できるとするほか、三菱電機の産業用ロボット「MELFA RV-FRシリーズ」と連携することで、接触を伴うより複雑で高度な力覚の必要な作業も可能としている。
-
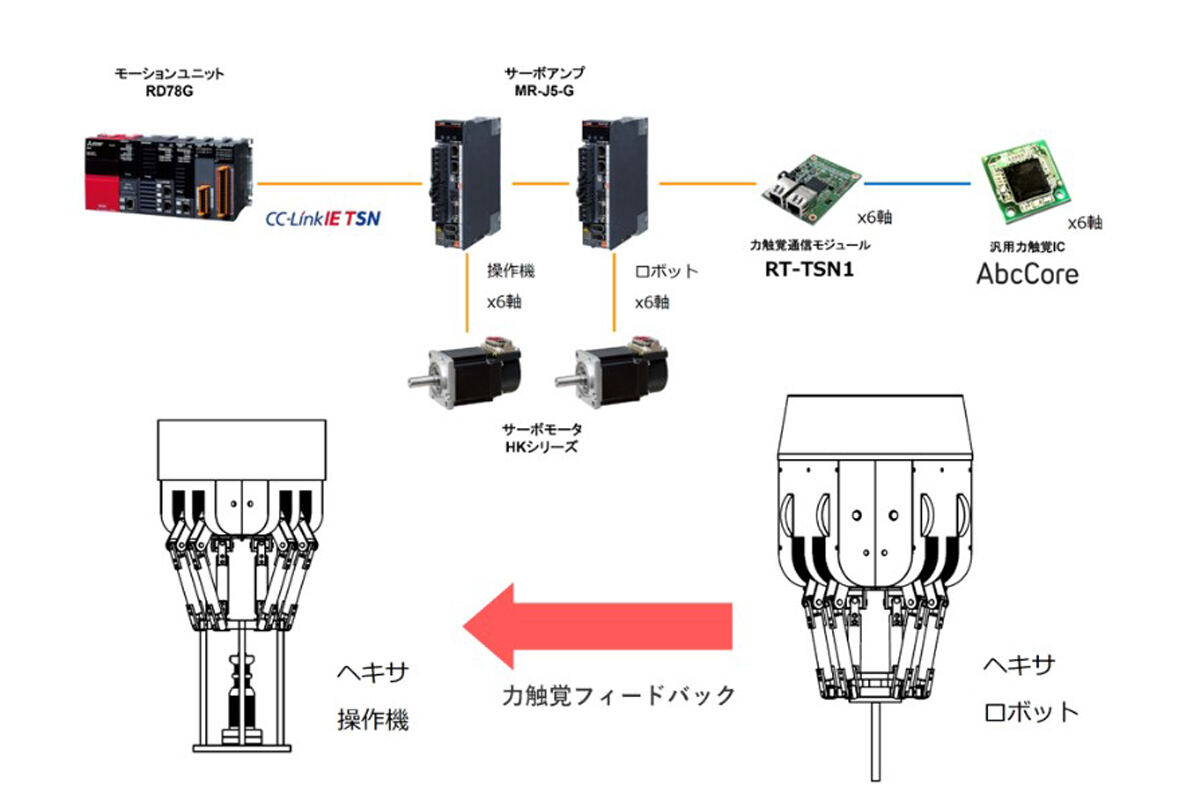
ヘキサロボットのシステム構成図(出所:日鉄エンジニアリング)

さらに、リアルハプティクスの実装を簡便にするためにモーションリブが開発したアルゴリズムを搭載した力触覚制御ICチップであるAbcCoreとの通信モジュール「RT-TSN1」を用いることで、AbcCoreとサーボアンプとのCC-Link IE TSNによるフルデジタル接続が実現され、ヘキサロボットと相似構造を持つヘキサ操作機でのリアルハプティクスを適用した遠隔操作を可能としたともする。
今後も共同研究を継続
なお4者では、遠隔操作で高度な力覚の必要な作業を行うことができる同ヘキサロボットは、ものづくりや製造業におけるかんごう、研磨、研削作業などの複雑な熟練作業へ適用できるほか、人材不足や現場作業環境の改善などの課題解決につながるものとしており、今後も共同研究を継続し、あらゆる作業を代替するロボットの開発に取り組むことで、安心・安全で持続可能な社会・産業インフラの構築に貢献していきたいとしている。