NTTと東京大学(東大)は10月2日、夜間や霧、雨の中などの視界が遮られる状況下でも、周囲環境の情報を伝える標識として機能し、ドローンの航法精度を向上させるミリ波RFIDタグを開発したことを発表した。
-
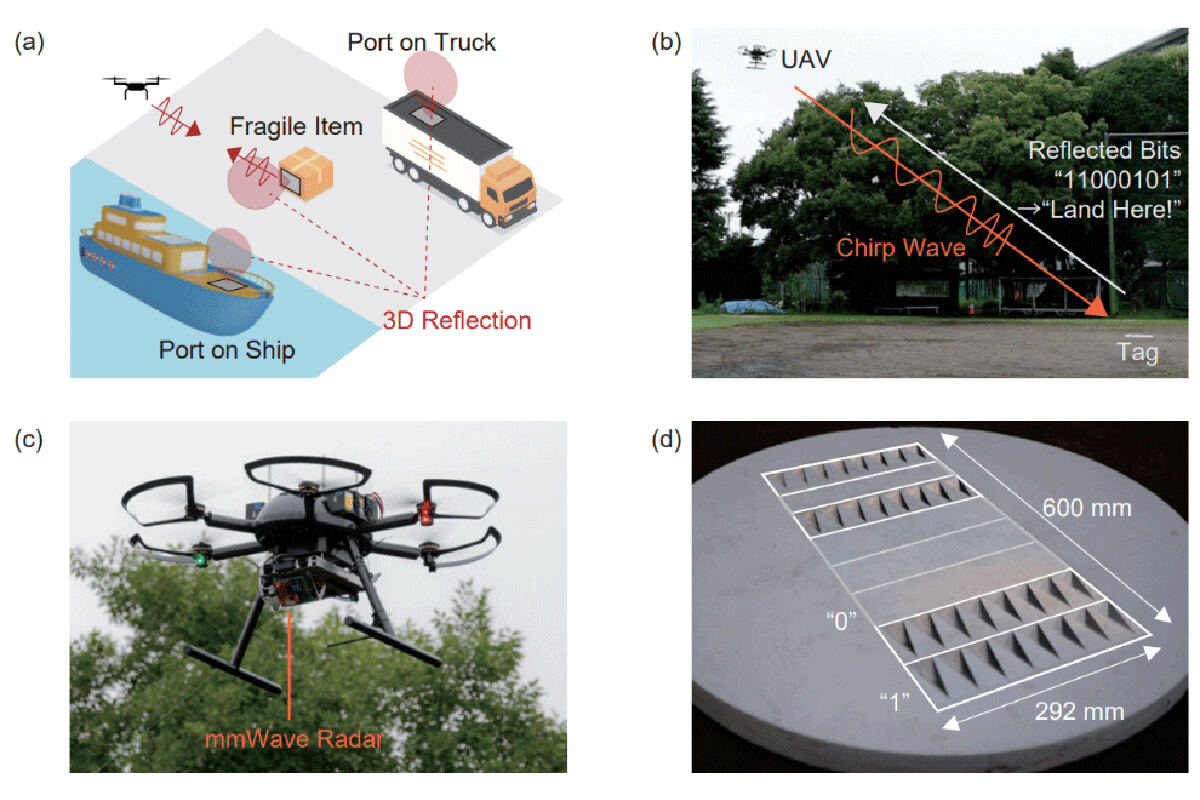
開発技術の概要。(a)正確な航法による船やトラックと強調したドローンの環境計測や物資運搬。(b)ドローンの誘導およびタグ読み取りの方法。(c)RFID読み取り装置のミリ波レーダを搭載したドローン。(d)今回開発された無電源RFIDタグ。(出所:NTT)

同成果は、NTT 宇宙環境エネルギー研究所の飯塚達哉研究員、同・小阪尚子主任研究員、同・中村亨主幹研究員(研究当時、現在はNTTアドバンステクノロジ所属)、同・久田正樹主幹研究員、東大大学院 工学系研究科の笹谷拓也助教、同・川原圭博教授らの研究チームによるもの。詳細は、2023年10月2日より開催されるIoT・ユビキタスコンピューティング分野の国際会議の1つ「ACM MobiCom 2023」のメイントラックにて発表される予定だ。
気候変動による地球温暖化の影響が深刻化する中、災害に強いレジリエントな社会を作ることが急務であり、その一環として、ドローンを代表とする次世代航空モビリティの活用が不可欠となっている。
2022年12月に施行された改正航空法により、ドローンは有人地帯での無人飛行が可能となったことで、環境計測や物流現場などさまざまな業務で活用されるようになってきた。そのため、ドローンの活用は昼夜・天候を問わず求められるようになり、災害時の救援活動や、海域を含む広範囲の地球環境観測を通じた気象予測精度向上などへの貢献が期待されているという。
しかし、現状のドローンの無人飛行はカメラを用いた画像認識技術に依存しており、夜間や悪天候時などの画像認識が困難な状況下では、飛行性能が著しく低下するという問題が生じていた。こうした課題を克服するため、画像認識が困難な状況下であってもドローンが周囲の状況を適切に把握し、自動着陸や物資運搬などの飛行を可能にする航法の高精度化が求められている。
そこでNTTと東大は、ドローンに搭載可能な小型ミリ波レーダを用いて、空中から広範囲で一夜情報を読み取れるバッテリレスなRFIDタグを開発したとする。両者によると、このタグを周囲環境の情報を伝える標識として活用することで、ドローンの航法を高精度化し、視界不良下での高度な自立飛行が可能になるという。
またこれまでにもドローンの航法や飛行誘導に関する手法は多数提案されてきたものの、今回の開発技術は、視界不良下で機能する上、電源のない場所でも利用できる点で優位性があるとのこと。これにより、電源の設置が難しい未踏領域においても全天候型のドローンとして自律的に活動し、災害対応や気象予測の高度化に貢献するとしている。
さらに両者は、読み取り範囲の狭さや周辺構造物による読み取り性能の低下など、従来のミリ波RFID技術が抱えていた課題を解決するため、タグの構造設計と信号処理手法を新たに確立したという。
読み取り範囲について、従来のRFIDでは平面型のアンテナを使用していたため、電波反射範囲が狭く空中から読み取れる範囲が限られていたとのこと。そこで今回は、3次元の再帰性反射を有するコーナリフレクタを利用したタグ設計手法を新たに開発したとする。
-
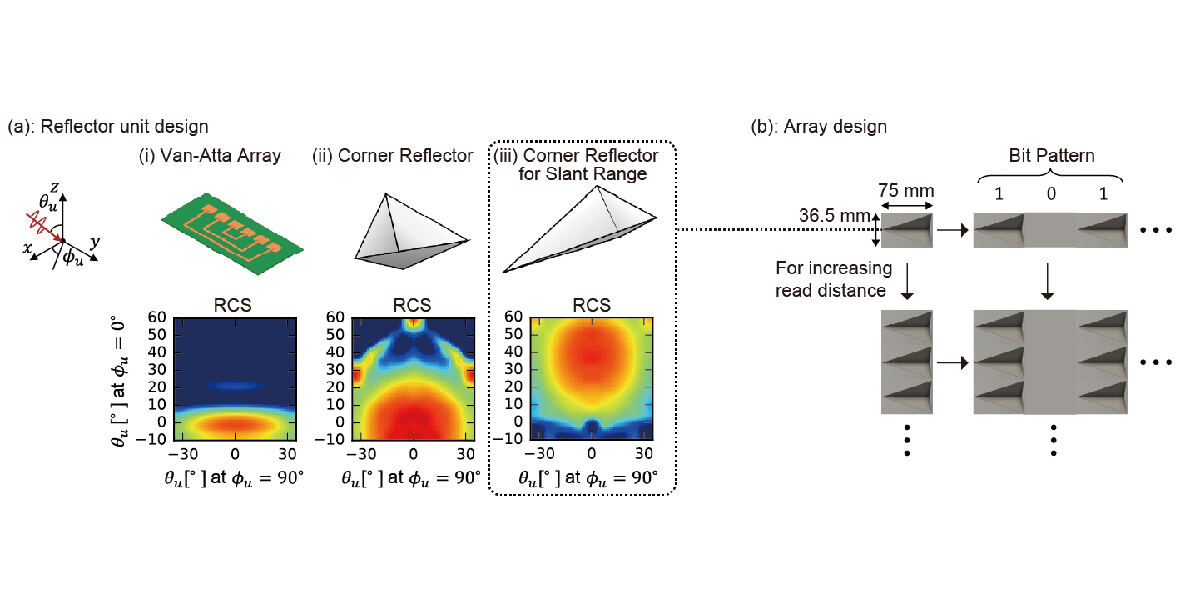
開発したRFIDタグの概要。(a)3次元に強く反射するように、タグを構成する散乱体として、形状を改良したコーナリフレクタを採用。(b)格納するビットと読み取り距離を設計するためのコーナリフレクタの配置手法の概要。(出所:NTT)

具体的には、コーナリフレクタ構造の形状変化やバーコードのような配置によるビットパターンと、読み取り可能距離の設計手法を確立。実験により、10m以上の距離から仰角30度以上および方位角20度以上の範囲で読み取ることができ、3次元の読み取り可能角度が従来の7.8倍以上となることを示したという。
-
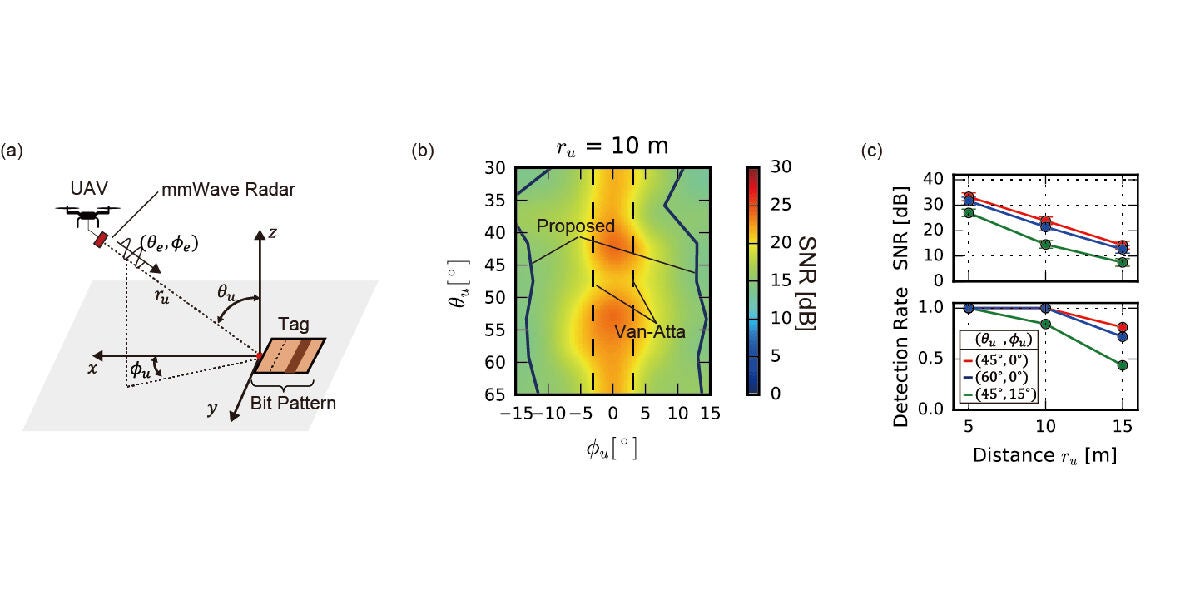
実験により検証した読み取り可能範囲。(a)評価した座標系。(b)読み取り距離10mの時にタグとの角度を変化させた際の信号強度。(c)異なる位置における信号強度と読み取り率の変化。(出所:NTT)

また読み取り性能を左右するミリ波レーダ信号処理の面で、従来のFFTを使用した位置推定では、空間解像度が固定されていることによりビットパターンの読み取り成功率が低くなるという課題があったとのこと。そこで今回は、固有値解析を用いて空間解像度を固定しない空間-反射強度推定手法を導入し、読み取り成功率を向上させたとする。
また、周囲から得られた空間-反射強度情報を含む点群をクラスタリングすることで、ノイズの多い環境下でもタグの位置を自動検出できる信号処理手法を開発したといい、実験の結果、壁や車、階段などの障害物が周囲にある状況でも、高精度にタグを検知して読み取ることができる事を確認したとしている。
-
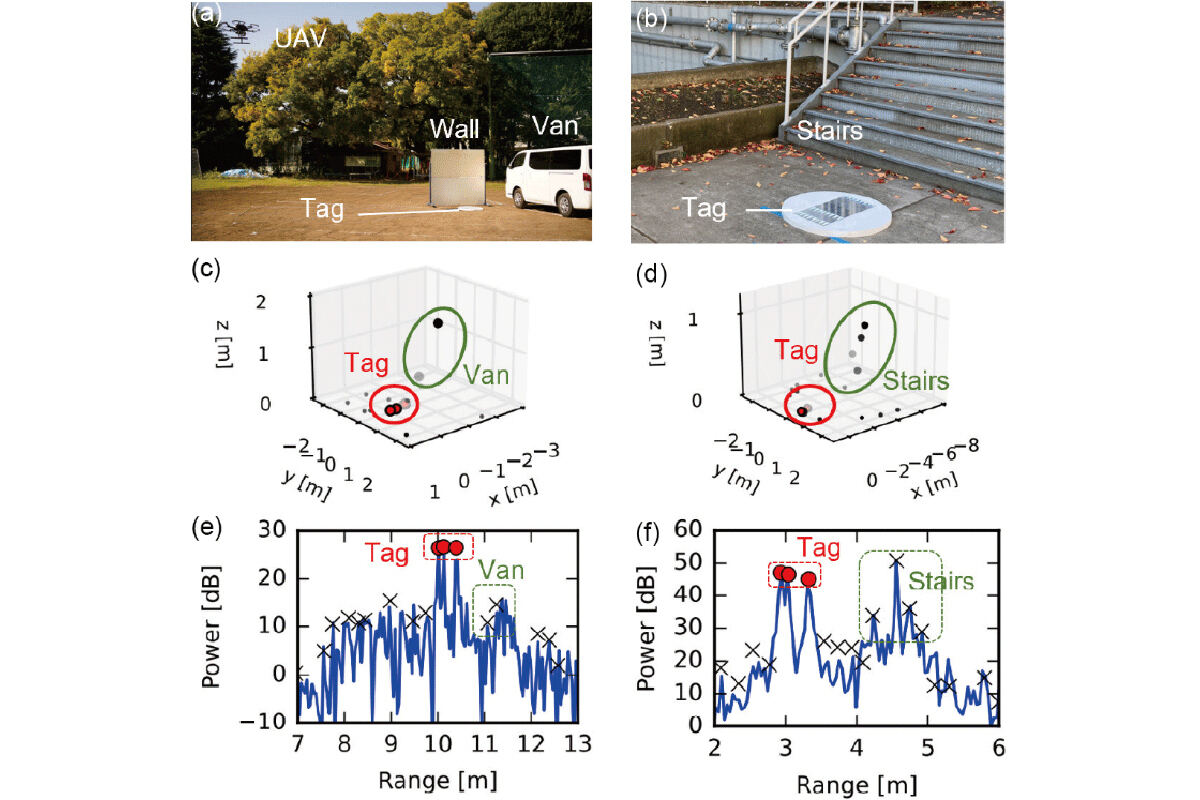
障害物による不要反射が多い環境下におけるタグ検出手法の検証結果。開発したタグはリフレクタの配置および強度に特徴的なパターンを有しているため、障害物が多くても検知できることを示している。(出所:NTT)

なおこの開発においては、NTTが、ミリ波レーダの信号処理手法を開発したほか、固有値解析を用いた空間位置推定および点群クラスタリングによるタグの自動検知手法を確立したとのこと。一方の東大は、RFIDの開発に加え、コーナリフレクタの形状や配置方法の設計手法を確立したという。
両者は今後、今回の成果であるミリ波RFIDタグの誘導技術を用いて、暗闇や悪天候といった過酷な環境下におけるドローンの自律的な運用を可能にし、災害対応や海洋観測の高度化実現を推進するという。また、物流や医療などの幅広い分野でもパートナーとの連携を目指すとした。
そして最終的には、ドローンを含むさまざまなIoTセンサで構成される空のセンサネットワークによって未踏領域の情報を把握するべく、ハードウェアからソフトウェアまで最適化されたシステムを実装し、4Dデジタル基盤を強化することで超レジリエント社会の実現に貢献するとしている。
今回の研究の概要動画(出所:NTT)