カシオ計算機と宇宙航空研究開発機構(JAXA)は1月24日~27日、福島ロボットテストフィールド(福島県南相馬市)において、測位技術の実証実験を行った。これは、カシオの可視光通信技術「picalico」(ピカリコ)を利用したもの。まだ具体的な計画は無いものの、将来は月面基地建設や資源探査等での活用が想定されているという。
-

カシオ計算機/JAXAの共同研究のメンバー

月面でなぜ測位が必要になるのか?
現在、月面開発が世界の大きなトレンドになってきている。国際宇宙ステーション(ISS)の次の大型国際協力プロジェクトとして、米国は有人月面探査計画「アルテミス」を主導。これには日本も参画を決めており、2020年代後半に、日本人では初となる月面着陸の実現を目指すとしている。
月面での有人探査活動を想定し、JAXAはトヨタ自動車と協力し、宇宙飛行士の移動手段となる月面探査車「ルナ・クルーザー」の開発を進めている。「月面基地」と聞くとまるでSFのように思うかもしれないが、もうしばらくしたら具体化してくるかも、という段階まですでに来ているのだ。
-

将来の月面基地のイメージ (C)JAXA

ただし、月面に宇宙飛行士を送り込むには、非常に大きなコストがかかる。そのため、将来、月面に恒久的な基地を建設する際には、人数は必要最小限に抑え、人間の作業は人間にしかできないことに集中。自動化できる作業については、可能な限りロボットにやってもらう、というのが基本方針となるはずだ。
JAXA側の研究代表を務める牧謙一郎助教(JAXA宇宙科学研究所 宇宙機応用工学研究系)は、「月面の活動では、測位技術が絶対に必要になる」と断言する。移動を伴うロボットに、測位技術は不可欠だ。たとえば資材を運搬するとき、もし自分の位置が分からないのであれば、どちらに動いたら目的地に着けるのか、考えることができないだろう。
-

JAXAの牧謙一郎助教(右)と、カシオ計算機の宮本直知氏(左)

測位技術の1つに電波を利用した「全球測位衛星システム(GNSS)」がある。中でもアメリカが提供している測位サービスが、我々がよく耳にするGPSである。ただ、GPSは精度も高くて便利であるが、月の周回軌道にはGPS衛星が飛んでいないため、月面では利用できない。将来的には地球同様に整備される可能性もあるものの、それまでの間は、何か別の手段が必要になるのだ。また月面基地の設置場所としては、縦孔内の地下空洞も有力視されているが、この場合は、地下なので衛星があっても電波が十分届かず、測位には利用できない。
そのため、JAXAは2020年、宇宙探査イノベーションハブの課題解決型テーマとして、アイデアを募集。カシオからの提案が採択され、共同研究がスタートした。
picalicoによる測位の仕組み
picalicoは、LED送信機とカメラによる可視光通信を利用して測位を行う。事前に配置しておくLED送信機は、赤、緑、青の3色の発光パターンを変えることで、ID番号を発信。各LED送信機の座標は予めデータとして共有しているので、カメラで複数のLED送信機を観測すれば、三角測量の原理によって、カメラの現在位置を特定できるというわけだ。
-

picalicoの原理。3色の発光パターンでID番号を表現する (C)カシオ計算機

今回の実験では、周辺環境にLED送信機を固定し、その中をカメラが移動する形だったが、逆に周辺に複数のカメラを固定して、LED送信機側を移動機にすることも可能だ。これらは、用途や環境に応じ、自由に選ぶことができる。
picalicoは本来、工場内などでの利用を想定し、開発された技術だった。最大の特徴と言えるのは、可視光を使うことだ。測位技術では、ビーコンを使った安価なものもあるが、工場の環境によっては、電波を出せない場合もある。可視光通信であれば、各国での面倒な電波の認証が不要というメリットもある。
牧助教は、「月面はpicalicoにとって最適な環境」だと指摘する。「将来、月面で様々な国が活動するようになると、地球と同じように、使う電波の調整が必要になる可能性があるが、可視光だと干渉の心配がない。また今回の実証実験では、吹雪で光が見えなくなることもあったが、真空の月面では遠くまで光が届きやすい」と述べる。
月面での利用イメージについては、「たとえばテニスコートくらいの基地を建設するのであれば、その周辺の20カ所くらいにLED送信機を設置するだけで良い」とメリットを説明。さらに、「kmオーダーの広い領域で、無人ローバーが資源を探査するような場合にも使えるかもしれない」と期待する。
今回の実証実験は、そういった月面での利用を想定し、行ったものだ。月面探査車に見立てた台車に、計測用のカメラや比較用のGPS等を搭載。月面の起伏のある地形を模擬した斜面を走行させ、どのくらいの精度で自己位置を推定できるのか、検証した。
-

台車の前後にHDカメラを2台設置。測位計算用の小型PCも搭載している

-

台車の上面には、キーボード、ディスプレイ、バッテリなども乗っていた

新開発のアルゴリズムを検証
カシオは20年以上前から、可視光通信の研究開発を行ってきたという。エンターテインメントなど、様々な分野への適用を模索してきたが、近年、工場や倉庫でフォークリフトの位置を調べたいといったニーズなどが出てきて、2019年3月、picalicoの測位システムとしての提供を開始した。
その後、JAXAとの共同研究が始まり、2021年末には、神奈川県相模原市の野球場において、1回目の実証実験を行った。このときは、野球場を月面のクレーターと想定。トラクターを月面探査車に見立て、測位の精度を確認した。
この1回目の実証実験では、本来屋内用であるpicalicoをそのまま流用、まず適用可能性を調べた。picalicoが元々想定していたのは、工場のようなフラットな床面。そのため、高さ方向を考慮しないアルゴリズムになっており、この制約によって、計算量を減らすことができていた。
しかし、実際の月面は起伏が激しい。この実証実験でも、段差で上下に揺れたときに大きな誤差が生じることがあり、この課題をまず解決する必要があった。これに対し、カシオは高さ方向にも対応するアルゴリズムを新開発。起伏のある地形でも精度を維持できるか試すため、今回、2回目の実証実験を行うことになった。
従来は平面上の移動だったのに対し、今回は立体的な移動になるため、どうしても計算量は増えてしまうが、良さそうな結果が出たら途中で計算を打ち切るなどの工夫によって、計算量を抑えた。これにより、十分なリアルタイム性も確保できたそうだ。
また、カメラによる自己位置推定に加え、ジャイロの計測値も補足的に利用することで、さらに精度を向上させているという。野球場での実証実験では、段差などで一時的に誤差がメートル単位まで大きくなることがあったが、新開発のアルゴリズムでは、安定して数cm~数10cmレベルの精度を実現できているとのこと。
襲う大寒波、吹き飛ぶ液晶モニター!
福島ロボットテストフィールドには、無人航空機、水中・水上ロボット、インフラ点検・災害対応など、各種ロボットのフィールド実験が可能なエリアが用意されている。今回の実証実験は、災害対応用のエリアにある土砂傾斜を利用して行われた。
-

実証実験が行われた土砂傾斜。2種類あるが、今回は手前の傾斜を使用した

この土砂傾斜の広さは30m×30m。両側に15°の傾斜があり、中央の高さは約3mだ。周囲には、LED送信機を16個設置。台車には駆動機構は無いので、手で押しながら走行させ、測位を行った。
-

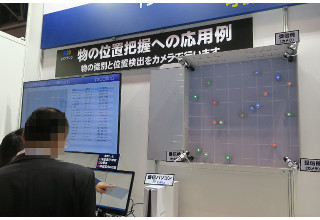
フィールドに設置されたLED送信機。RGBの3色で点滅する

-

カメラからの画像。認識されたID番号が表示されている

しかし運悪く、この実証実験のタイミングに合わせたかのように、大寒波が襲来。筆者も東北新幹線の遅延で現地への到着が1時間遅れたほどで、フィールドは積雪で真っ白になっていた。しかも、月面の環境に近づけるため、テストの本番は日没後に行われたのだが、とんでもない強風になり、厚手のダウンを着込んでもガタガタ震えるハメになった。
日没後の試験の様子。音声から、当日の強風の具合が分かるだろう
暗くて良く分からない思うので、暗くなる前の様子もアップしておく
-

傾斜は15°とのことだったが、下から見上げるとかなりの急坂

-

日没後の様子。将来、月面でこんな風景が見られるかも?

-

あまりの強風に、テーブル上の液晶モニターが吹き飛んだ……

測位結果を3D表示。高さをうまくトレースできていることが分かる
カシオは宇宙開発に初挑戦!
カシオというと、時計や楽器の印象が強いメーカーであるが、宇宙開発に関わるのはこの共同研究が初めてだったという。カシオ側でチームを率いる宮本直知氏は、「夢があって楽しい」としつつ、「今はまだ地上でしかやっていないので、実験自体はいつもと何も変わらない感じ」だと笑う。
今後、picalicoを実際に月面へ持って行くためには、さらに放射線や真空など、宇宙環境ならではの難しい開発が必要になってくる。まだまだ先は長いが、「共同研究が続く限り取り組んでいきたい」と意気込む。
宇宙探査イノベーションハブの取り組みは、地上技術を宇宙に活用しつつ、その成果を地上にフィードバックすることも狙いの1つ。それについて、宮本氏は「今回の開発により、カメラの仰角が変わっても測位ができるようになった。GPSが使えない屋内でのドローンの位置制御などにも活用できるかもしれない」とアイデアを述べる。
牧助教も、民間との協業については、「メーカーの技術力は高い。最初から持っている高い技術を、さらにブラッシュアップできるのが大きい」と、手応えを述べる。月面基地の建設には、様々な技術が必要になる。今後、さらに多くのメーカーが宇宙分野に参入し、技術を活用することを期待したいところだ。