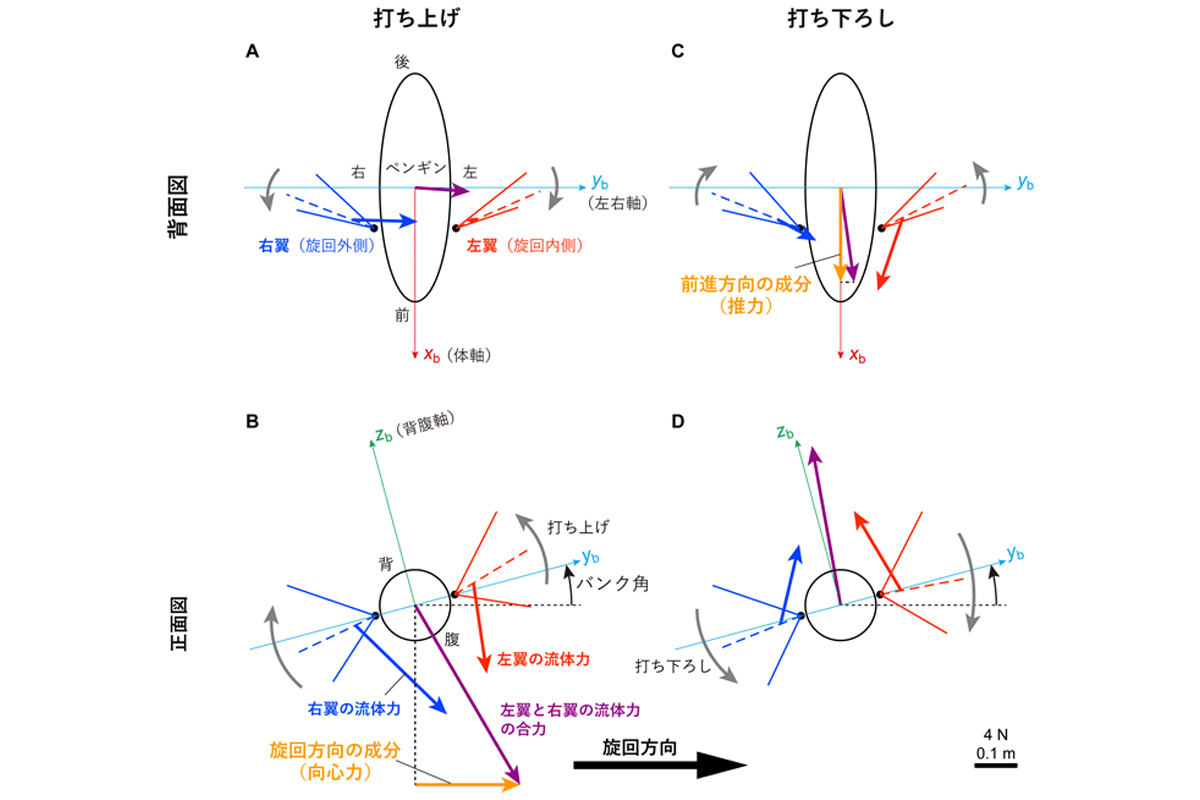
ペンギンは主に体軸方向に泳ぐため、水平旋回する時は速度方位角と体方位角の両者が変化する。解析の結果、ペンギンは打ち上げ開始前に、旋回内側に腹が向くようにバンク(平均15度)していることが確認された。このバンクの向きは、旋回する飛行機のバンクとは逆だった。これは、飛行機とは逆で、ペンギンは上向きの浮力に対抗して下向きの力を出す必要があるためと考えられるという。
そして速度方位角は打ち上げ中に大きく増加(羽ばたき中の増加分の76%)。同様に、機首方位角も打ち上げ中に大きく増加した(羽ばたき中の増加分の65%)。つまり、打ち上げが旋回に大きく貢献していたのである。
左水平旋回には、体の軌跡を左方向に曲げるために、左方向への向心力が必要で、確かに打ち上げ中には、打ち下ろし中よりも、体の左方向に大きな並進加速度が生じていることが確認された。ところが体軸方向については、打ち下ろし中の方が打ち上げ中よりも大きな並進加速度が生じていたことが判明(1.6倍)。つまり、水平旋回中の打ち下ろしは、前方への推進に貢献していることになる。研究チームはこの結果について、直進遊泳時には打ち上げの方が打ち下ろしよりも前進に貢献していたのとは、逆の結果だとした。
-
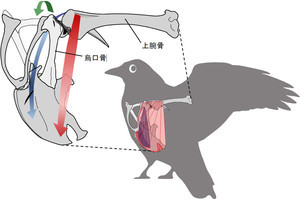
ペンギンの翼の流体力(出所:東工大プレスリリースPDF)

翼と体がどのように連動して旋回を実現するのか、羽ばたき旋回遊泳のメカニズムが次のようにまとめられた。
- 打ち上げ前に、腹が旋回内側に向くようにバンク角を取る
- 打ち上げ時には、旋回内側の翼を外側よりも大きく打ち上げ、腹方向の流体力を旋回方向の向心力として利用し、軌跡を曲げて旋回する
- 打ち下ろし中は、旋回内側の翼の流体力の前向き成分(推力)が大きく、前進する
- 打ち下ろし中の旋回内側の翼の大きな推力は、体のヨー回転にブレーキをかけて旋回を抑制する
-
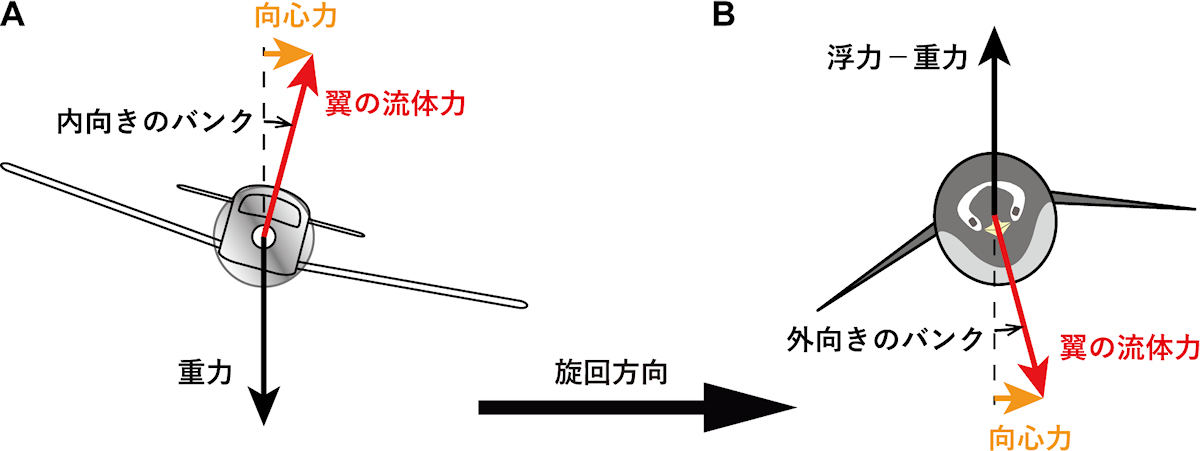
左旋回する飛行機(A)とペンギン(B)のバンクと力の方向の模式図(出所:東工大プレスリリースPDF)

研究チームによると、今回の研究で明らかにされたペンギンの遊泳に関する力学メカニズムの理解は、ペンギンの形態学や生態学に新たな視点を提供するという。さらにこうした視点から、空中を飛行していた鳥類がいかに水中遊泳に適応進化したのか、というペンギンの進化生物学の謎に、力学の面から迫ることができるとした。
研究チームは今後、今回の緩やかな旋回の研究結果をベースに、より高速で急な旋回や急上昇・急降下、あるいは急加速・急減速といった、ペンギンの多様で俊敏な機動遊泳の性能とメカニズムの研究を続けていくという。また、これらの俊敏性を備えるペンギン模倣型羽ばたき遊泳ロボットへの応用を進めるとした。