宇宙航空研究開発機構(JAXA)は11月18日、米国の超大型ロケット「SLS」(Space Launch System)初号機に相乗りし、月へ向かった超小型探査機「OMOTENASHI」の状況について、説明を行った。同探査機はロケットから分離後、トラブルが発生。想定外の速さで回転しており、発電できていないことが分かったという。
-
JAXAの超小型探査機「OMOTENASHI」 (C)JAXA

JAXAは現在、復旧するための運用を続けている。しかし、同17日以降、探査機からの電波は受信できておらず、現在の状況は不明だ。月にはどんどん接近しており、残された時間的な余裕はあまりない。厳しい状況ではあるが、運用チームはまだ月面着陸を諦めてはおらず、当初の計画とは違った形の着陸も検討している。
ロケットからの分離後に何が起きた?
SLS初号機は、11月16日15:47(日本時間)に打ち上げを実施。OMOTENASHIは予定通りにロケットから分離されたことは確認できたものの、最初の可視であるNASA DSNマドリード局での運用(同20:41~)で通信を試みたところ、探査機が回転しており、電波強度が弱い状態であることが分かった。
-

SLS初号機には、多数の超小型探査機が相乗りしていた (C)NASA/Cory Huston

送信機をハイパワーモードにすると通信が可能になり、探査機からテレメトリを受信。このデータを確認した結果、太陽電池が太陽の反対を向いたまま、高速に回転していることが明らかになった。回転速度は約80°/sという、通常なら考えられないような速さ。しかもコマのように安定しているため、このままだと全く発電ができない。
通常であれば、OMOTENASHIはロケットからの分離時に電源がオンになり、自動的にシーケンスが開始、太陽捕捉制御を行うはずだった。これは、太陽電池に太陽光が当たるよう、姿勢を変える制御である。探査機は、電力を失ってしまえば、もう何もできない。探査機にとって電力は、真っ先に確保しなければならない、最重要なリソースなのだ。
ただロケットからの分離時、探査機は分離機構から外乱を受け、回転運動を始める。OMOTENASHIは、この回転が小さい場合には、リアクションホイールで太陽捕捉を開始するが、回転が大きかった場合は、リアクションホイールでは能力が足らないため、まずガスジェットを噴射し、回転を止めてから太陽捕捉するようにプログラムされていた。
-

起動時の自動シーケンス (C)JAXA

しかし、原因は不明だが、OMOTENASHIはこのとき、なぜか高速に回転していた。太陽捕捉モードに移行していたが、太陽は捕捉されていない状態だった。このままだと電力が枯渇してしまうので、運用チームは急遽、ガスジェットを噴射するコマンドを送り、回転を止めることを試みた(レートダンプ制御)。
だが、発電ができていない状態のため、バッテリ電圧が低下。このままでは回転が止まる前に電力が尽きることが予測されたため、レートダンプ制御を中断。次に、回転軸方向を動かすようにガスジェットを噴射するコマンドを送った。完全に太陽を向かなくても、少しでも太陽が当たるようになれば、徐々に充電ができるようになるはずだ。
しかし電圧の低下は続き、ついには送信機がオフに。これを最後に、現在まで探査機からの電波は受信できておらず、回転軸の向きがどのくらい変わったのか、結果は不明だ。
-
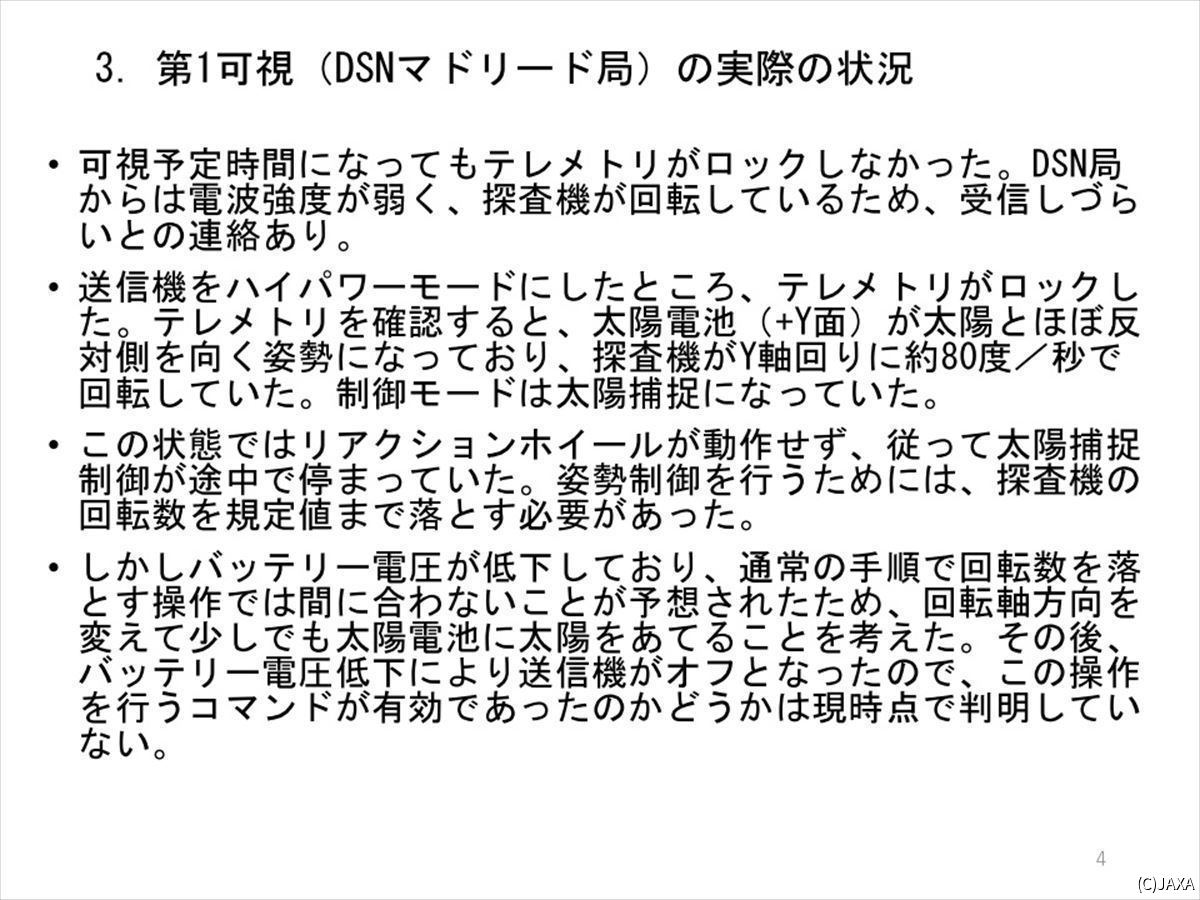
最初の可視での状況 (C)JAXA

探査機は電源がオフになった可能性が高いが、バッテリが充電されれば再起動し、同じように自動的にシーケンスが開始する仕組みだ。ただ、送信機とガスジェット装置は消費電力が大きいため、バッテリが少ししか充電されていない状態だと、またすぐに電源が落ちて、これを繰り返すことになってしまう。
そのため、2回目の可視であるゴールドストーン局(17日02:55~)以降の運用では、再起動しても電源が落ちないよう、送信機とガスジェット装置を使わない設定にするコマンドの送信を続けている。まずはバッテリの充電を最優先に進めよう、という方針だ。
ただ送信機がずっとオフのままだと、状況が全く分からない。そのため、短時間だけ送信機をオンにするコマンドも、定期的に送信しているとのこと。
-

2回目の可視以降の対応 (C)JAXA

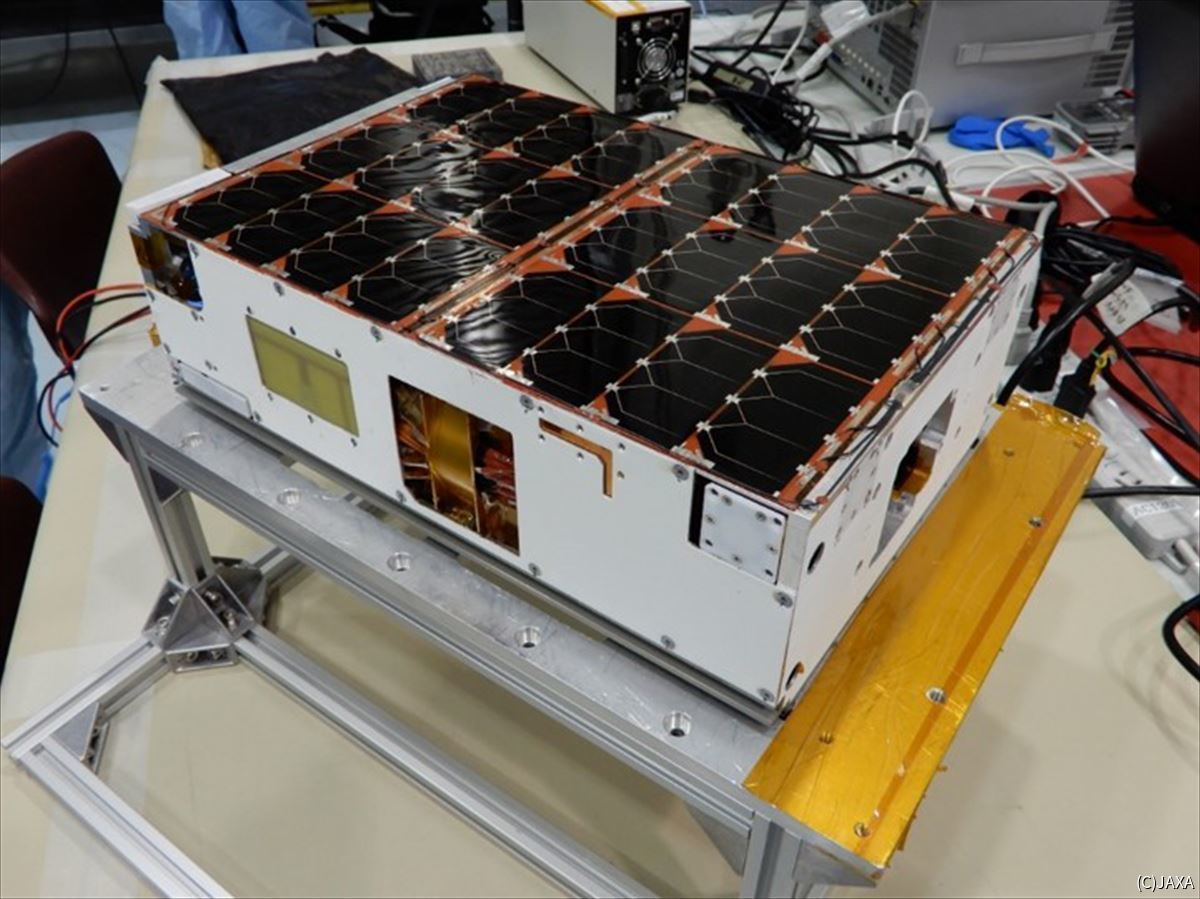
OMOTENASHIの太陽電池は、+Y面にしか貼られていない。OMOTENASHIチーム長の橋本樹明氏(JAXA宇宙科学研究所 宇宙機応用工学研究系 教授)によれば、裏側の面などにも貼りたかったものの、分離装置のサイズが決まっていて、太陽電池を貼る隙間がもう無かったため、できなかったそうだ。
しかし、なぜ高速回転していたのか。OMOTENASHIの開発時、NASAから伝えられていた仕様では、分離時の外乱は最大でも10°/sだったという。テレメトリにはガスジェットの累積噴射時間が記録されており、それによると10°/s程度のレートダンプ制御が行われた模様だが、発見された時の状況とは矛盾している。
気になるのは、姿勢制御系に不具合は無いのか、ということだ。もし異常があれば、復旧のために姿勢を変えようとして、さらにおかしな姿勢になりかねない。ただ、今のところ故障している機器は見つかっておらず、可視中の運用ではレートダンプ制御が正常に機能し、回転速度の低下が見られたという。
一方、日本のもう1機の超小型探査機「EQUULEUS」については、これまで順調に運用が進んでいる。EQUULEUSの分離時の外乱について確認したところ、回転速度は10°/s程度だったそうで、大きめではあるが想定内だった。
現状、事実として分かっているのは、最初の通信確立時に、約80°/sという速さで回転していたということだけだ。ロケットからの分離時に高速回転したのか、レートダンプ制御や太陽捕捉制御がうまくいかなかったのか、あるいはその後に何かが起きたのか、現状では何も分かっていない。
現在、運用チームは探査機の復旧に全力を尽くしているため、この原因究明をしている余裕はほぼ無い。このあたりの原因が判明するのは、おそらく全てが終わってからになるだろう。
復旧できた場合の運用はどうなる?
OMOTENASHIはもともと、2回の軌道制御を行う計画だった。1回目(DV1)は、月のそばを通過する軌道から、月に衝突する軌道へ投入するもので、これはガスジェットを使う。そして2回目(DV2)は、月面への衝突速度を落とすもので、これは固体ロケットモーターによって行われる。
-

OMOTENASHIの構造。3つの部分から構成される (C)JAXA

OMOTENASHIのサイズは約11cm×24cm×37cm。中心に円筒形の固体ロケットモーターが入っていて、その頭部にわずか0.7kgの着陸機が搭載されている。探査機全体を着陸させる余裕は無いため、着陸の直前に固体ロケットモーターに点火し、外側の探査機本体は捨て、身軽になる仕組みだ。
-
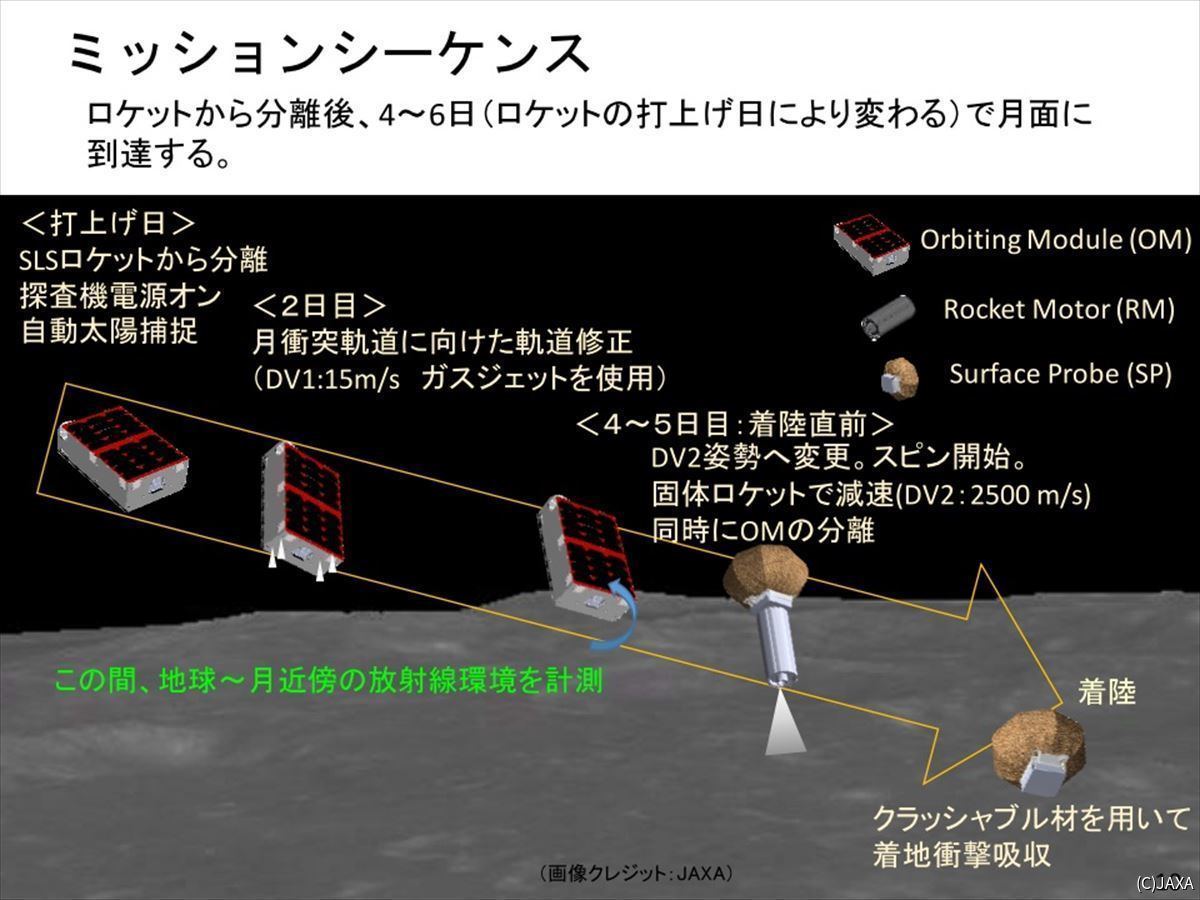
ミッションのシーケンス (C)JAXA

当初の計画では、17日22:30にDV1を開始する予定だったが、このタイミングでは実施できなかった。DV1は遅れれば遅れるほど制御量が大きくなるため、なるべく早く実施する必要がある。探査機がいつ復旧できるか次第になるが、太陽捕捉が完了し、復帰できたらすぐDV1を実施できるよう、コマンドを準備しているという。
-
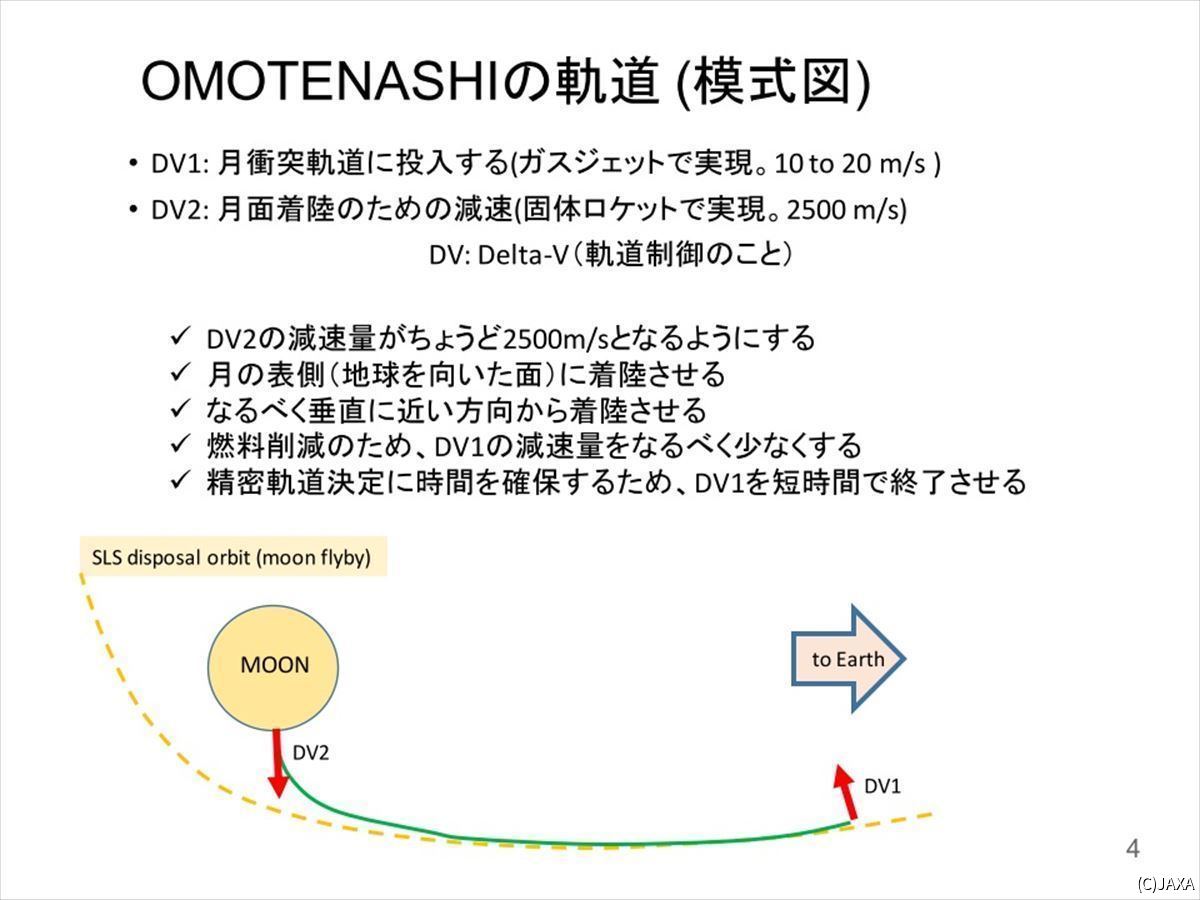
何もしなければ月を通過してしまうので、DV1で軌道を変える (C)JAXA

もし仮に、DV1が実施できなかった場合はどうなるのか。この場合、運用チームは、DV2のみで着陸することを検討しているという。ただ固体ロケットモーターは一度しか使えず、途中で燃焼を中断することもできない。月衝突軌道への投入と衝突速度の減速を同時に行うことになるため、本来の着陸とは想定が大きく異なってくる。
この場合、本来よりも高い高度で噴射が終了し、そこから自由落下で加速して月面に衝突することになるため、衝突速度は間違いなく大きくなる。本来の想定は75m/s以下で、JAXAはこれをセミハードランディングと呼んでいたが、もはやセミハードとは言えず、ハードランディングに近い状態になる。
さらに、姿勢も問題だ。本来は、着陸機の下側から衝突するはずだったため、下側にあるクラッシャブル材で衝撃を吸収する予定だったが、どのような向きになるか分からない。開発当初は上側にエアバッグを膨らませる予定で、現在も搭載はされているが、配管などはもう省略されてしまったため、今から膨らませることはできない。
-

当初はエアバッグも膨らませる計画だったが、変更された (C)JAXA

ただ、着陸機は機器部分をエポキシで充填するなど、高い衝撃に耐えられるよう作られている。衝突場所が岩などであれば難しいが、レゴリスで柔らかい地形であれば、ハードランディングでも「不可能ではない」(橋本教授)と見る。
しかしいずれにしても、全ては探査機からの電波が復活するかどうかにかかっている。このまま通信が途絶えたままだと、何もできない。DV2の予定時刻は、21日23:55±1時間程度。DV2のシーケンスには数時間が必要になるため、遅くとも、数時間前までには復帰していなければ、間に合わなくなってしまう。そこがタイムリミットになる。
あまり考えたくはないことであるが、もしこのままDV2まで間に合わなかったらどうなるのか。もし現在も太陽と反対向きで回転を続けていれば、回転軸の向きはそのまま維持されるものの、太陽の周りを公転しているため、数カ月後には太陽が当たるようになると予測される。
ここで電力は復活するはずだが、OMOTENASHIは惑星間軌道へ行ってしまうため、もう月への着陸はできない。ただ、OMOTENASHIには、今後の有人月探査/火星探査のために、放射線環境を測定するというミッションもあった。数100万kmくらいなら通信は可能とのことで、最後まで復旧を目指す構えだ。
-
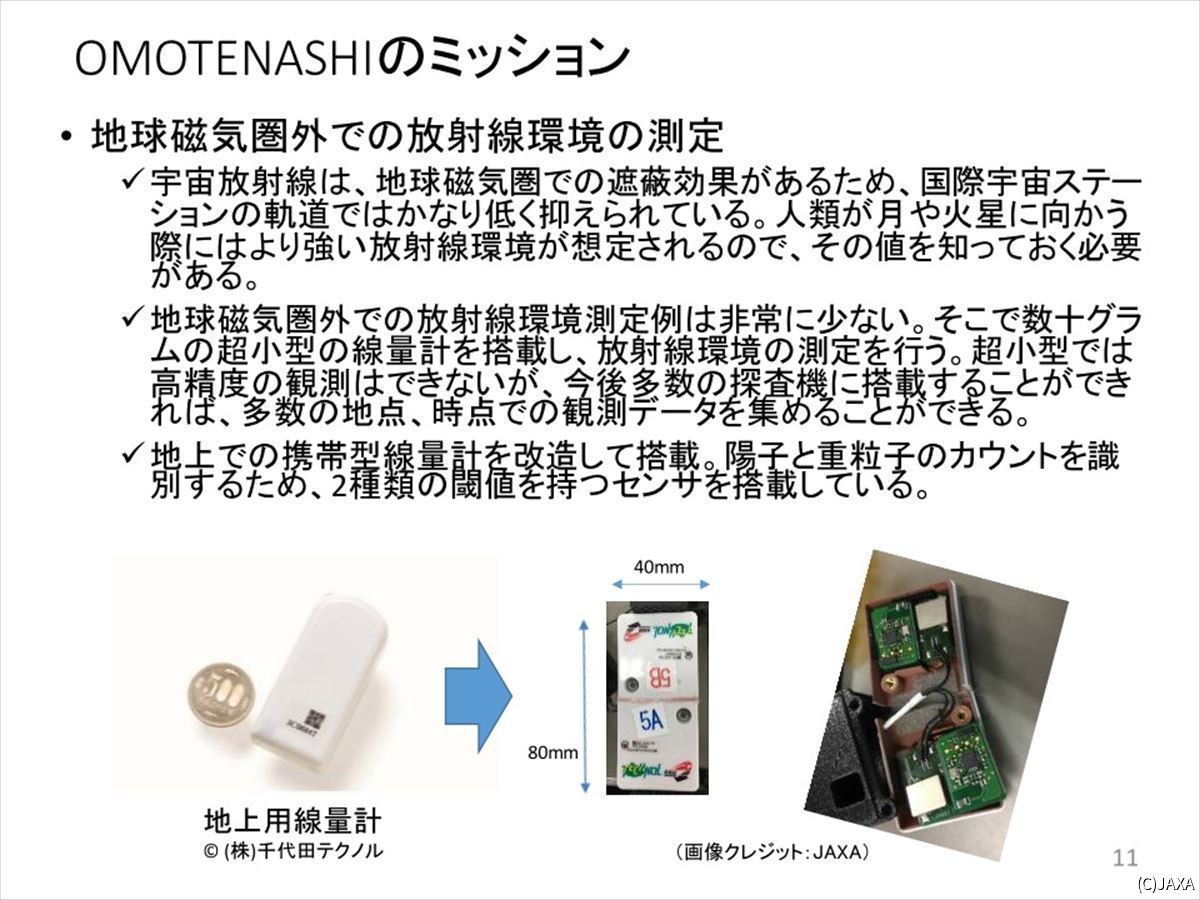
OMOTENASHIには、放射線を計測するセンサーが搭載されている (C)JAXA