GITAI JAPANは8月17日、稼働爪を持つ「グラップルエンドエフェクタ」をアーム両端に搭載した“シャクトリ虫”型ロボットアーム「GITAI IN1(Inchworm One)」を開発し、同社の月面作業用ロボットローバ「GITAI R1」と協調して、宇宙航空研究開発機構(JAXA)相模原の模擬月面環境で米国航空宇宙局(NASA)の技術成熟度レベル(TRL)におけるレベル3に対応する各種試験を実施し、成功したことを発表した。
-

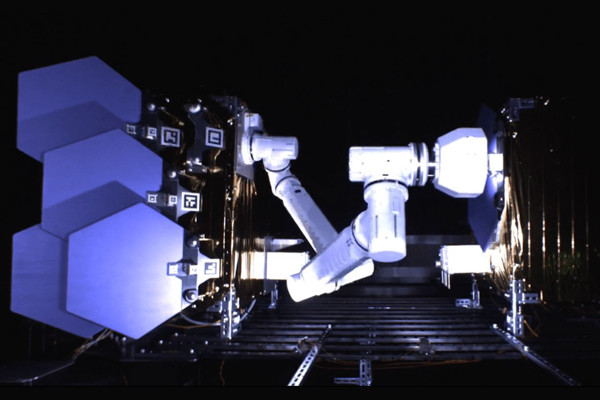
シャクトリ虫型ロボットアームGITAI IN1。GITAI JAPANが発表した3種類目の宇宙作業用ロボットアーム (出所:GITAI JAPANプレスキット)

国際宇宙ステーション(ISS)の老朽化に伴い、民間による宇宙ステーションの建設が複数発表されている。また、アルテミス計画では、月周回有人拠点「ゲートウェイ」の建設に始まり、メインの月面有人探査、さらには2020年代後半の恒常的な月面有人活動拠点(月面基地)の建設などが行われる計画である。このように、宇宙開発が本格化する中、微小重力・低重力環境下でロボットに求められる作業内容は多様化・複雑化してきている。
このようなニーズに応えるために、同社は複数の仕事を実施することが可能な「タスク性能」、広範囲に仕事を行うことが可能な「移動性能」の2つの課題を解決可能な自律ロボットアームとして、GITAI IN1を開発することにしたという。
タスク性能として実現されたのは、その柔軟な接続機能により、さまざまなツールと接続して用途の異なる複数の作業が可能な点で、GITAI IN1は、アームの両端にグラップルエンドエフェクタを搭載している。
グラップルエンドエフェクタとは、その嵌合(かんごう)相手となる「グラップルフィクスチャ」(グラップルエンドエフェクタがつかむための機構)とともに、ロボットアームの手先を交換(着脱)可能にするためのインタフェースで、グラップルエンドエフェクタは、グラップルフィクスチャと嵌合した際に機械結合、電力結合(充電機能)、通信結合の機能を備え、エンドエフェクタ・ツールなどを操作することが可能になるという。
-

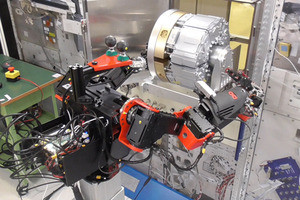
GITAI IN1のアームの両端にはグラップルエンドエフェクタが装備されており、そこにエンドエフェクタ・ツールを装備することで、各種作業を行えるようになる (出所:GITAI JAPANプレスキット)