物質・材料研究機構(NIMS)は6月3日、40年にわたって議論が続いてきたテントウムシの脚裏がガラス面などでも滑らずにいられる接着原理を解明したと発表した。
同成果は、NIMS 構造材料研究拠点の細田奈麻絵グループリーダー、東京大学の須賀唯知名誉教授(現・明星大学客員教授)、東京大学の中本茉里大学院生(研究当時)、独・キール大学のStanislav N. Gorb教授らの国際共同研究チームによるもの。詳細は、英オンライン総合学術誌「Scientific Reports」に掲載された。
持続可能社会を実現するための要素の1つに、リサイクルがある。可能な限りリサイクルすることが望ましいことから、接着技術にもスポットが当たっている。
これまで接着剤などの接着技術は、強力であることが求められてきた。しかし今後はそれが変わっていく。たとえばダンボール箱1つを取っても、中にものを入れて運ぶときはしっかりと接着していることが求められるが、使い終わったあとはリサイクルの回収などに出しやすいよう、箱を簡単にたためるのが望ましい。つまり、「接着力は現在のまま、それと同時に容易に剥離もできる」という新しい接着技術の開発が求められているという。
そこで、研究者たちはバイオミメティクス、つまり自然界を手本にする形で接着と剥離を繰り返す機能についての研究開発を行っている。爬虫類や昆虫のように、天井や壁などをまるで重力がないかのようにスイスイと歩行できる生物たちの脚を、自然界が長い時間をかけて洗練してきた仕組みを模倣しようというわけである。
実際、ヤモリの脚の接着機構が「分子間力」であることが解明され、この爬虫類をモデルとした接着テープの開発ブームが引き起こされた経緯がある。
一方、テントウムシなどの昆虫も、接着と剥離を迅速に行える優れた脚裏構造を備えている。脚裏は細長い毛状構造(剛毛)で、硬い剛毛なのにガラスのような平滑面を滑らずに歩行可能だ。
その仕組みは、1980年に、脚裏の剛毛と基板が分子間力により接着している可能性が示されると同時に、分泌液の量によっては表面張力(毛管力・ラプラス圧力)や凝集力も作用する可能性もあるという報告がなされたことが始まりとなる。
しかし、当時の技術では分泌液の量を直接観察することができず、分子間力の可能性は仮説に留まったという。そのため、接着の原理が解明されないまま、その後40年にわたって議論が続いていたという。
21世紀に入り観察・測定技術が進展した結果、それまでは見ることのできなかった生物の微細構造の観察や、微細構造がもたらす優れた機能の測定が可能となってきた。そこで今回の研究も、そうした観察・測定技術の進展のもとにする形で取り組まれたという。
-

ガラス基板上を滑ることなく歩行するテントウムシ。ガラス基板に接している白い部分が脚裏 (出所:NIMS Webサイト)

-
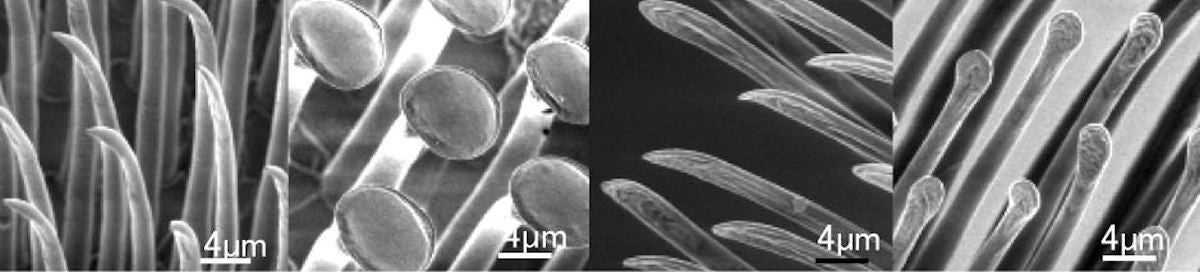
ナナホシテントウの脚裏に生えている毛の形状 (出所:NIMS Webサイト)

テントウムシが平滑なガラス基板上を滑らずに歩行できるのは、剛毛の接着力によることはわかっていたが、その接着力を生み出している力としては、「分子間力」、「表面張力」、「凝集力」の作用などが推測されていた。そこで研究チームでは、これまで測定されてこなかった分泌液の量の調査を実施。その結果、分泌液層の厚さ、つまり剛毛と基板の距離が10~20nm以下であることが判明したという。ちなみにこの10~20nmという距離は「長距離での分子間力」が作用する範囲であるという。
-
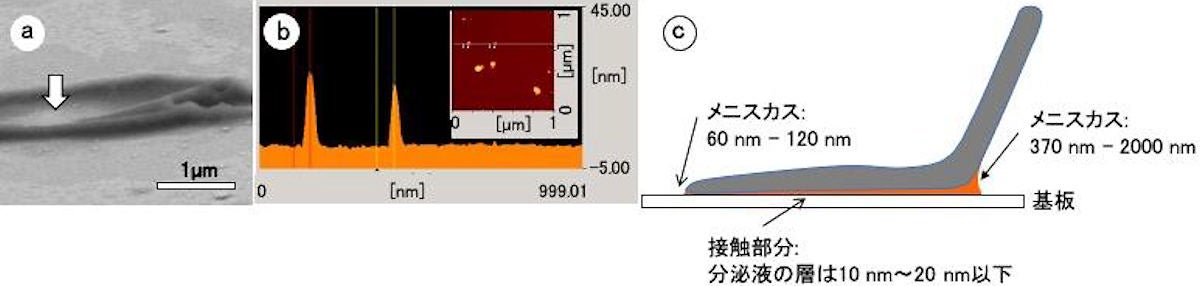
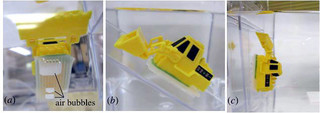
(a)凍結させた分泌液層。(b)AuPd粒子の高さの測定。(c)分泌液層の厚さ分布の模式図 (出所:NIMS Webサイト)

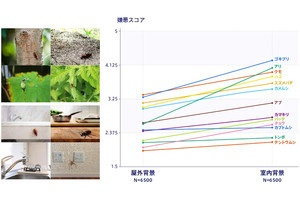
さらに接着の仕組みの判定が、材料科学の「接着仕事WA」の概念を導入して行われたほか、異なる材質(表面エネルギーの高い順に、シリコンウェハ、ガラス、高分子材料2種類)の基板上を、テントウムシが歩くときの牽引力の測定が行われたところ、テントウムシの接着力は接着仕事に相関することが明らかとなり、主要な接着の要因が「分子間力(ファンデルワールス力)」であることが証明されたという。
-
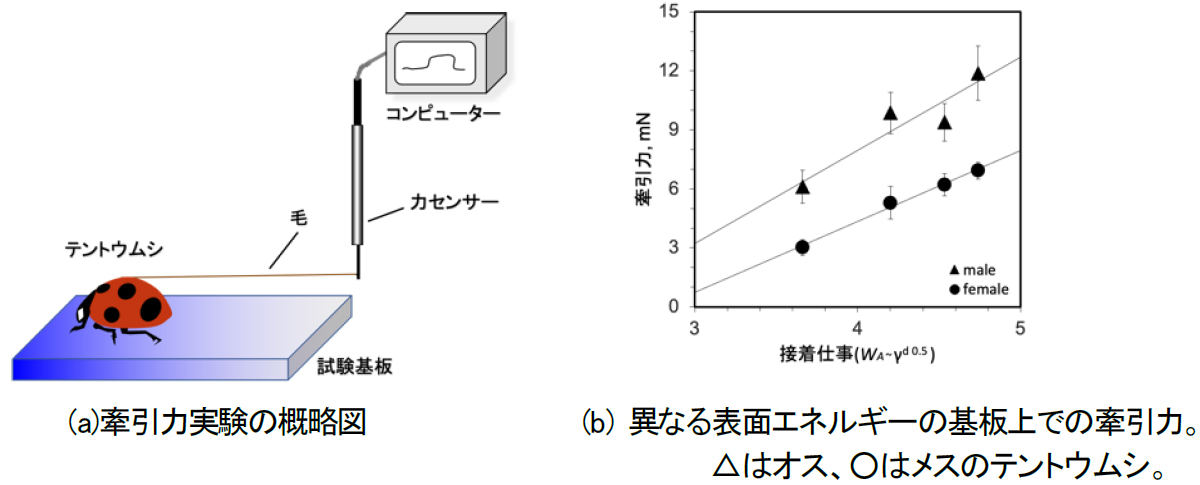
テントウムシの牽引力測定。(a)牽引力実験の概略図。(b)異なる表面エネルギーの基板上での牽引力。▲はオス、●はメス (出所:NIMS Webサイト)

分子間力の中でも分散性成分が主であり、極性成分の影響は受けないことも判明。これは、テントウムシが分散性の高い成分を含む分泌液を出しているということであり、表面により強く付着できることを意味しているという。植物の葉の多くは天然のワックスで覆われており、分散性成分の高い表面となっている。そのため、テントウムシは生息地の植物種に適応できる足裏を進化させてきたことが考えられるという。
今後、研究チームはこの成果をもとに人工的な接着・剥離構造を開発し、テントウムシのように多様な場所で移動が可能な災害対策ロボットの脚部への応用や、精密機械の部品着脱装置などへの応用を目指していくとしている。