



オムロンとスクエア・エニックス(スクエニ)は、オムロンの卓球ロボット「フォルフェウス」に、スクエニが開発を進めてきたゲームプレイヤーの感情などを理解するメタAI技術を適用し、プレイヤーごとにモチベーションを高めるために最適なフィードバックを可能とするAIアルゴリズムの開発を進めていくことを明らかにし、2019年12月18日~21日にかけて東京ビッグサイトにて開催されている「2019国際ロボット展(iREX2019)」において、その概要説明を行った。
-

iREX2019のオムロンブースに設置された第5世代フォルフェウス。プレイヤーのモチベーションを高めるAIの搭載は第6世代以降を予定している

オムロン創業者である立石一真氏は創業の哲学として「機械にできることは機械に任せ、人間はより創造的な分野での活動を楽しむべきである」という旨を掲げていた。また、それを受けて、現在の同社のコア技術は「センシング&コントロール+Think」というものであり、センサによるデータ取得、そのデータの制御へのフィードバック、そしてそのデータから読み取れる減少への意味づけの3つの方向性の取り組みが進められている。
フォルフェウスはそうした同社の哲学とコア技術を分かりやすく社会に説明するために開発が続けられてきたロボットで、現在は最新世代となる第5世代が稼動。同社が一般的に販売しているセンサやロボット技術、サーボ技術などで構成されているが、そのコンセプトは「一流のプレイヤーと一流のコーチの両方の実現」であり、そのために「多様な打ち方の実現」、「人の動作の予測」、「打ち方のコーチング」といった部分が進化を遂げている。
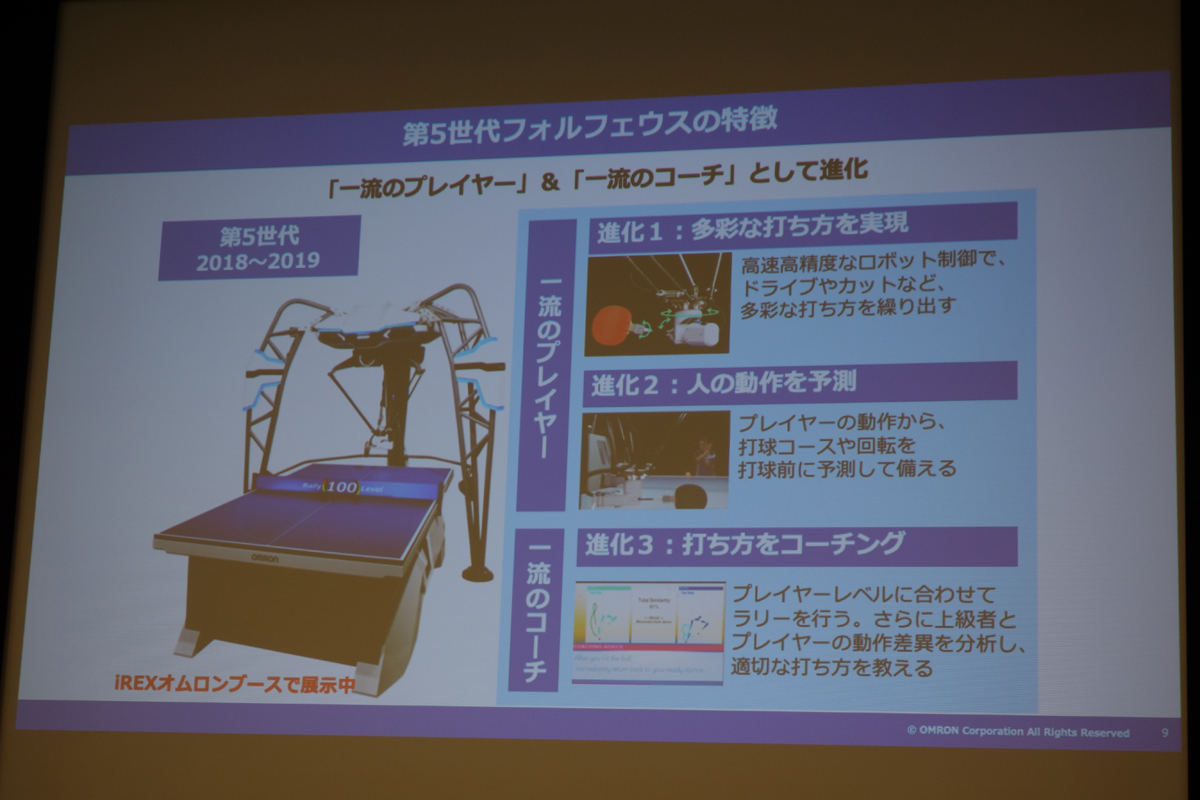
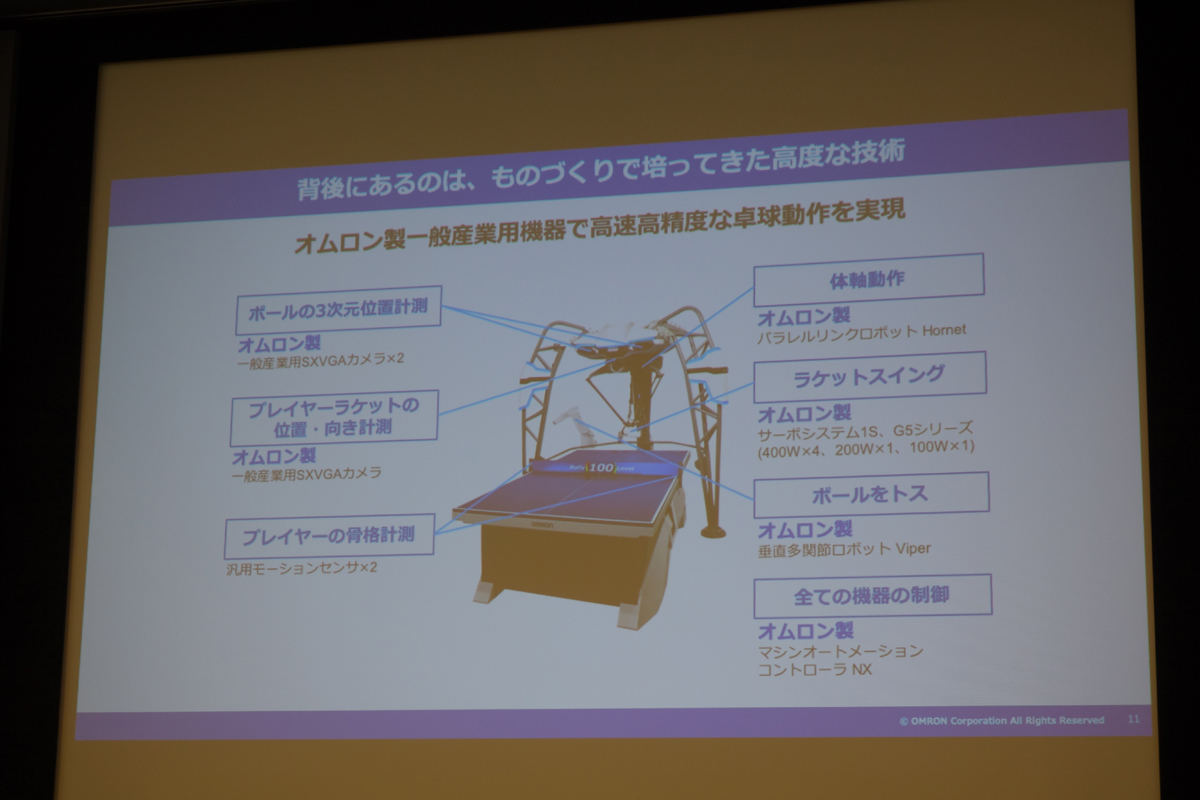
第5世代フォルフェウスの特徴と、その構成要素


今回の共同研究は第6世代以降に向けた取り組みとなるもので、目標とするのは、「機械が人の成長を加速させ、潜在能力を引き出してくれる未来の実現」。そのためには、「機械自身の性能向上」、「人の能力の向上」、そして「人の成長意欲の向上」の3つの要素が絡み合うことが重要であり、このうちの1つ、"人の成長意欲の向上"についての強化を両者で図っていこうというものとなる。
-
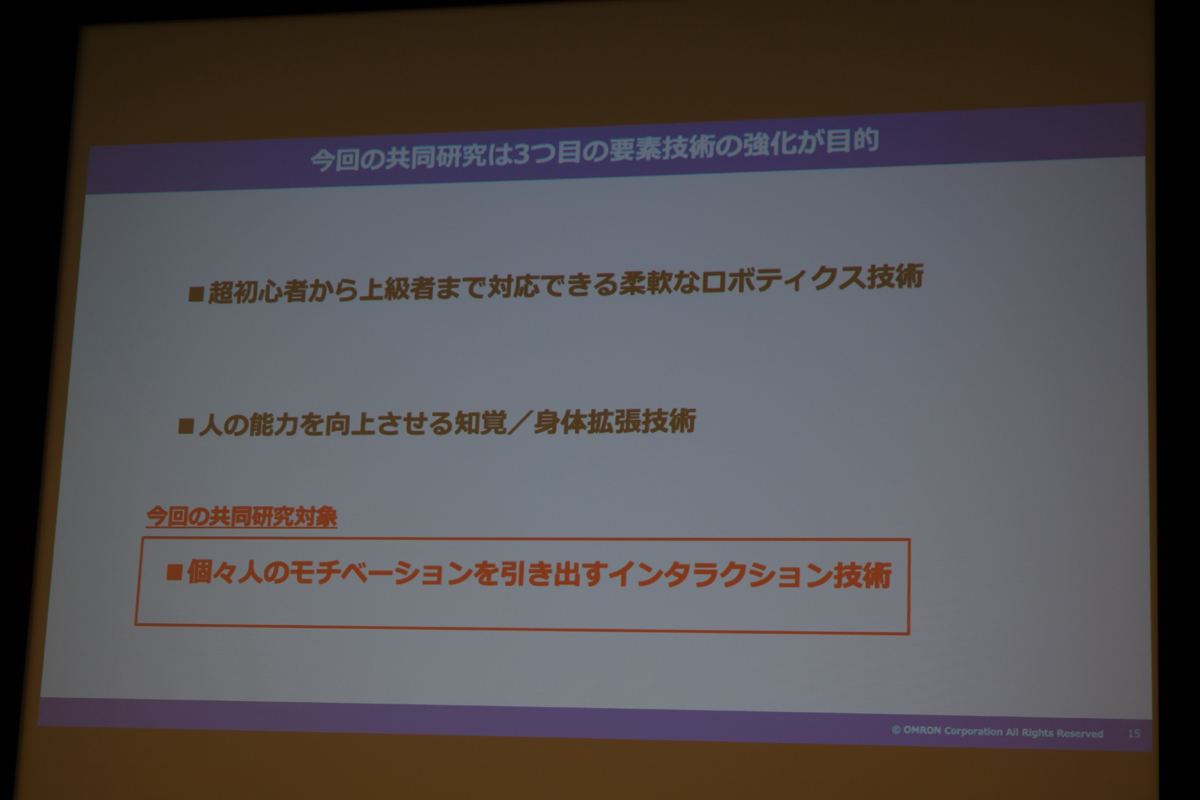
今回の共同研究で目指すのは人の成長意欲の向上に向けた個々人のモチベーションを引き出すインタラクション技術の確立

具体的には、センシング関連などを通じた人の状態把握は引き続きオムロンが担当するが、その情報をどのようにモチベーションを高めるラリー計画に反映していくか、というAIの部分をスクエニのゲームAIの知見を適用していくこととなる。
-
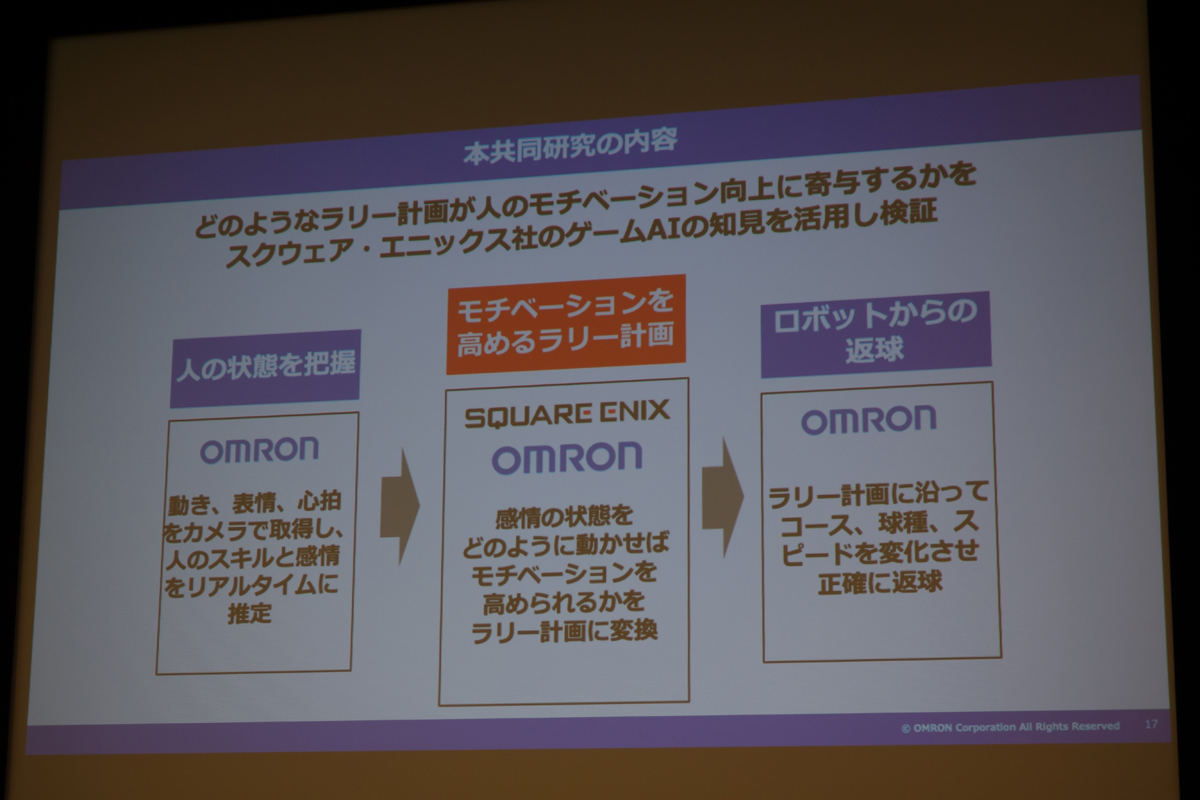
共同研究の役割分担

ちなみに今回対象となるメタAIは、ゲームAIの中でもゲーム中の状況を監視し、ユーザーの心理を推測してキーとなる役割を適切なタイミングでNPCなどを利用してそれとなくユーザーに提供することを可能とするものであり、ゲーム全体の流れを作る存在ともいえる。そのため、スクエニのテクノロジー推進部 リードAIリサーチャーである三宅陽一郎氏は、「これまでのゲームは1つの体験を多くの人に提供してきたが、メタAIの活用により、ユーザーごとにマッチした体験を提供できるようになる」と、ゲームのあり方が変化していく可能性を説明。すでにいくつかのゲームでは実際に搭載されているとした。
これをフォルフェウスに適用した場合、プレイヤーが何をしたいのか、ラリーでどう成長したいのか、どのような性格の人物なのか、といったデータを入力していくことで、個別最適化されたモチベーションアップを実現できるようになり、AIの進化が進めば、誰でも極限まで感覚が研ぎ澄まされたいわゆるゾーンやフローといった状態を体験できるまでに引き上げていけるのではないか、という。
-
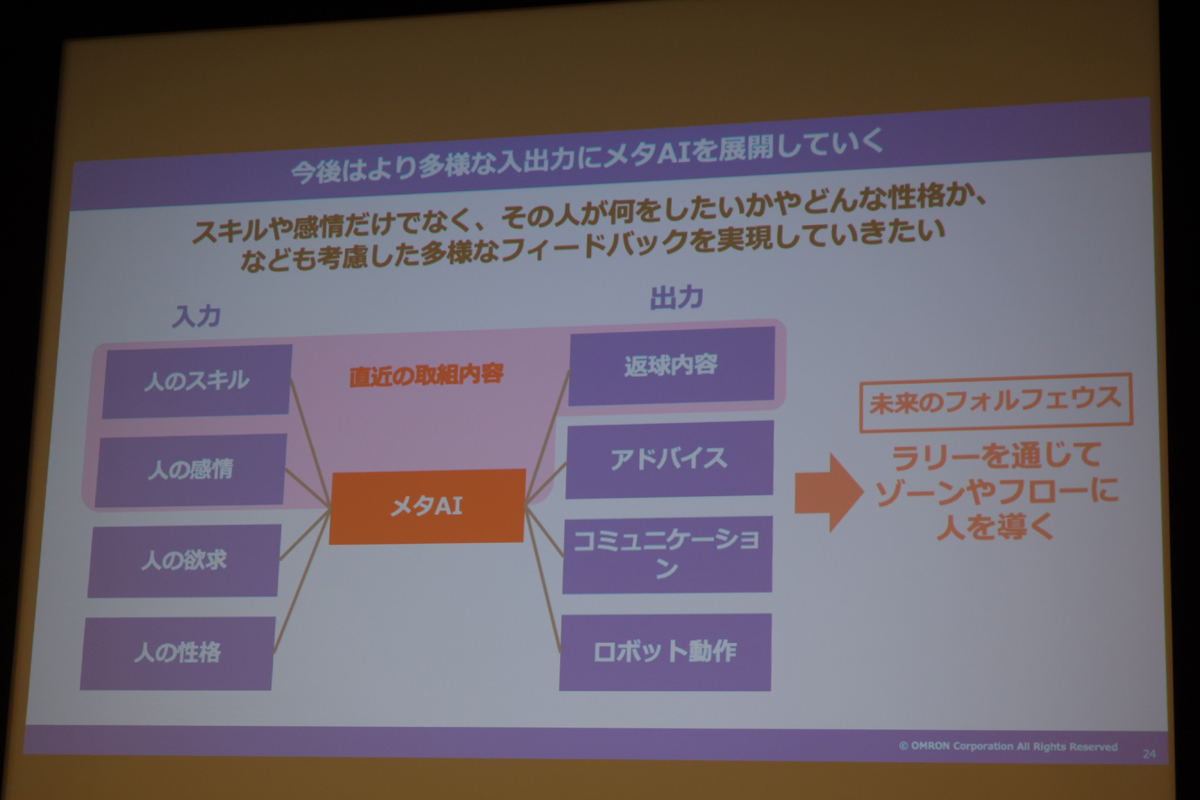
メタAIの活用による未来のフォルフェウスの方向性

また、さらなるフォスフェウスの進化の方向性としては、人の能力向上という大前提に基づき、それを実現するためのARや光、音などを組み合わせたマルチモーダルな拡張であったり、パワーアシストスーツのような拡張身体技術の活用によるガイドのとおりにラケットを振るだけで、プロ並みのスイングを実現できるようになったりといったことに向けたインタラクション技術の活用を進めていくとしており、「人と機械の融和により、人と機械がともに成長し続ける、限界を超えていく関係性をフォルフェウスを体感した人が、そういう未来を感じてもらえるように進化させていきたい」(オムロン 技術・知財本部 技術・知財本部 研究開発センタ 無線・組込研究室 主査 卓球ロボット「フォルフェウス」開発リーダーの八瀬哲志氏)としている。
-
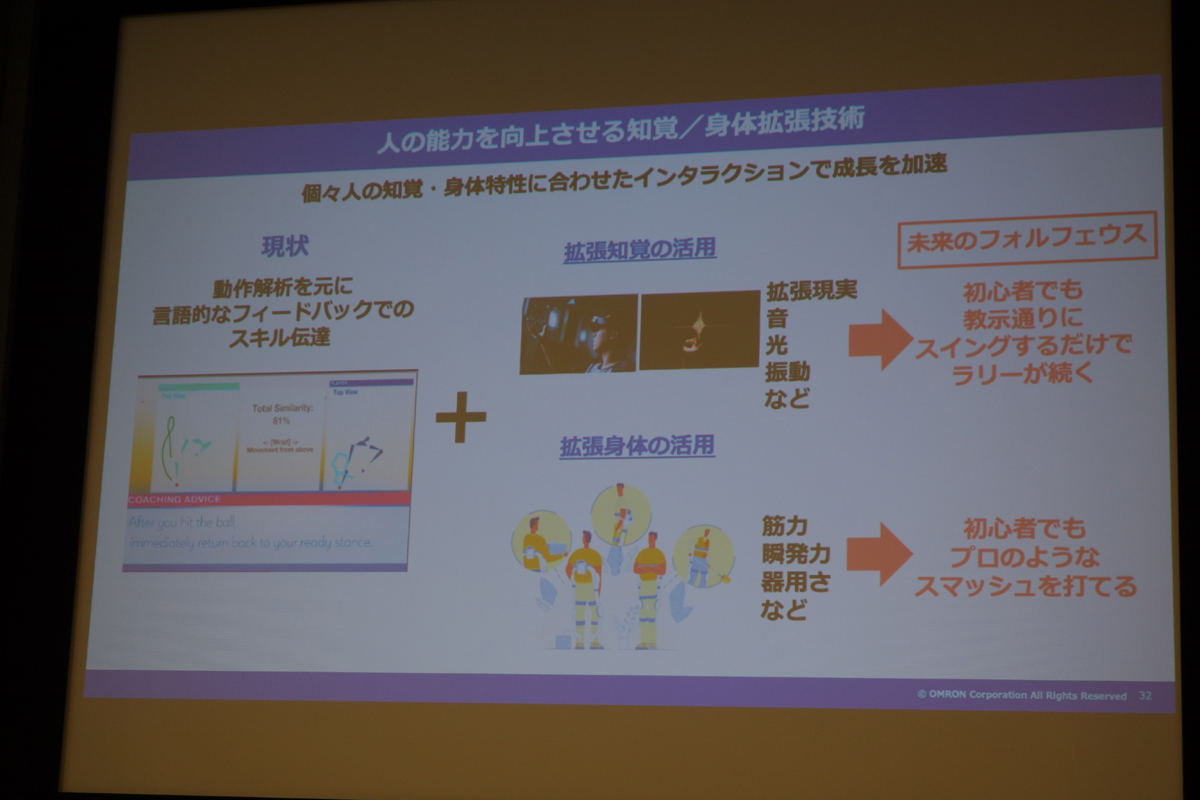
さらなる進化に向けたイメージ

ちなみに今回の共同研究の成果については、2020年初頭に米国で開催されるCES 2020にて披露される予定だという。
2019国際ロボット展のオムロンブースにおける第5世代フォルフェウスのデモの様子
工場の省人化/生産性向上を提案するオムロンブース
このほか、オムロンブースでは最先端の工場での生産性向上を可能とするさまざまな技術の紹介が行われている。例えば、参考出展としては、500gと小型軽量のためロボットハンドに搭載可能ながらも、平均500msで物体認識が可能な高速バラ積みピッキングソリューションやビジョンセンサとエンコーダを利用した仮想的な触角センサを組み合わせることで、10μmオーダーの組み付け精度を可能にするAIロボットなどの実演を見ることができる。
-

参考出展の平均500msで3D CADデータとバラ積みの実物を比較し、ピックアップするデモの様子。黒い箱に認識用のカメラが搭載されている

-
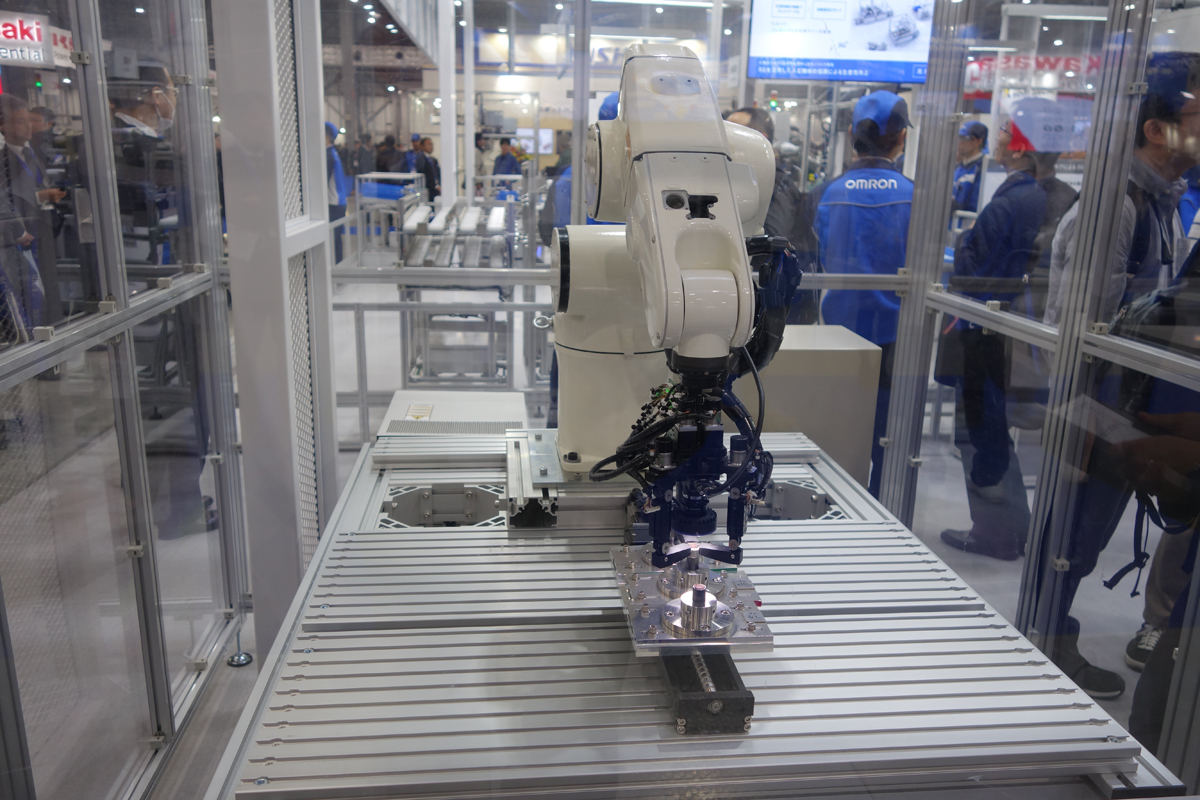
参考出展のビジョンセンサと仮想的な触角センサの組み合わせで10μmオーダーの組み付け精度を高速にできるようにしたAIロボットのデモの様子

2019国際ロボット展のオムロンブースにおける10μmオーダーの組み付け精度を実現したAIロボットのデモの様子
2019国際ロボット展のオムロンブースにおける10μmオーダーの組み付け精度を実現したAIロボットのデモの様子(ロボットの手元をズームしたバージョン)
また、同社がNTTドコモ、ノキアグループと9月に発表したオムロン草津工場で進めようとしている5Gを用いたレイアウトフリーの生産ラインの実現に向けたデモも行われているほか、工作機械の加工室の扉の開閉まで可能なマシンテンディング、可搬重量250kgに対応したAGVと可搬重量12kgのロボットアームを組み合わせた重量のある大箱の積載作業デモといったものも見ることができる。
-

5Gを利用したレイアウトフリーの生産ラインの様子を模したデモの様子。AGVが自由に走り回り、部品を供給していく様子が見られる

-

可搬重量250kgのAGVに、可搬重量12kgのアームで荷物を積載するデモの様子。これらはすでに販売済みだが、現在、よりピックアップなどの作業を楽にプログラムできるソフトウェアの開発を進めているという

2019国際ロボット展のオムロンブースにおけるマシンテンディング時の扉の開閉の様子
なお、こうしたデモ展示は、すでに商用化されているもののほか、参考出展とは言いつつも、2020年度中には販売される予定の商用化目前のもの、研究室レベルのものとさまざまなものが入り混じっているので、興味がある人は実際に同社ブースへ赴いて、デモの詳細を確認することをお勧めする。












