米国航空宇宙局(NASA)は2019年12月3日、今年9月に月着陸に挑むも行方不明となったインドの月着陸機「ヴィクラム(Vikram)」を発見したと発表した。
NASAの月探査機「ルナ・リコネサンス・オービター(LRO)」の観測データから見つかったもので、ヴィクラムは墜落しており、月面に衝突した痕跡や機体の破片が写っている。インドのアマチュア天文家が最初に発見し、それを受けNASAがさらに追加の観測を行い、断定に至った。
-
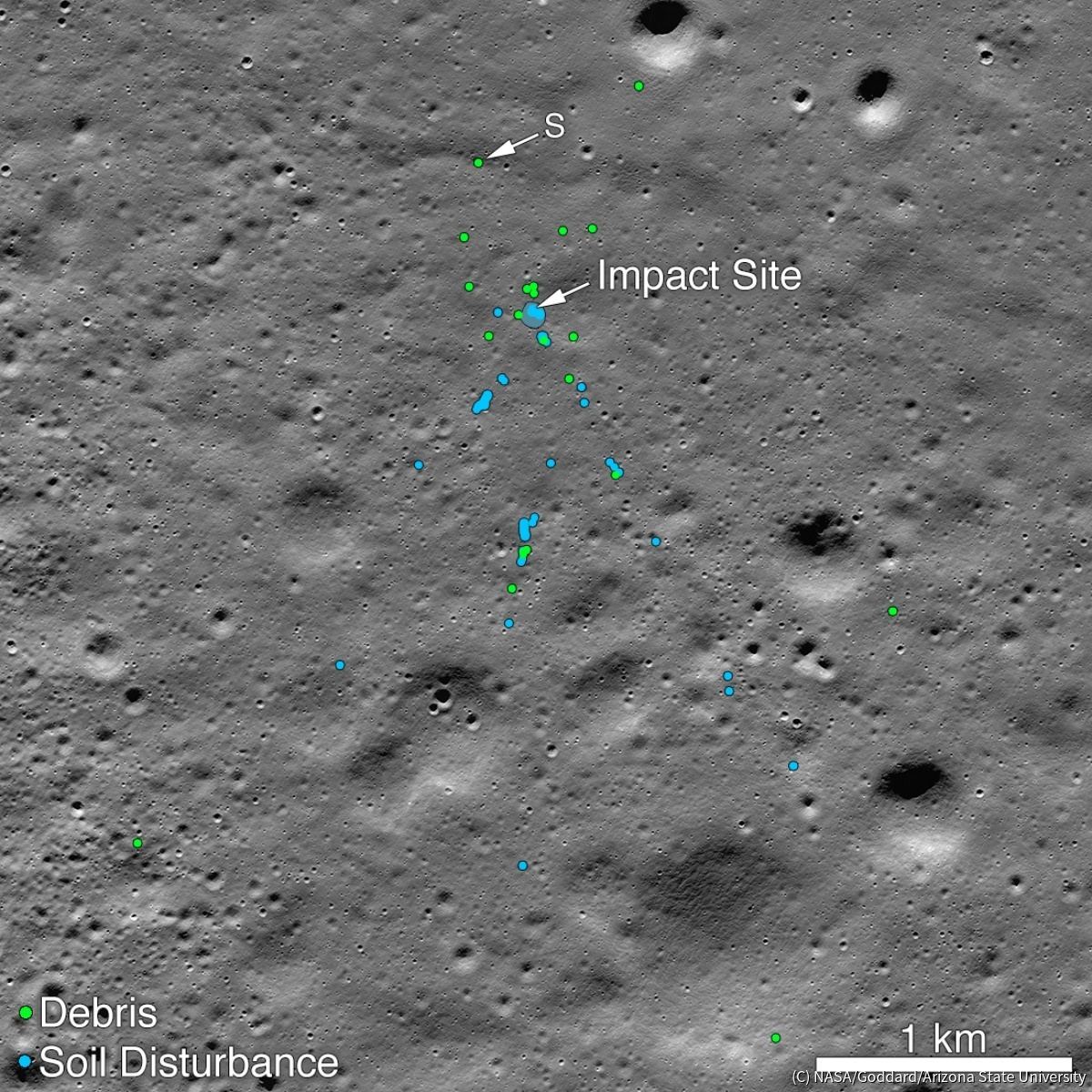
NROが発見した、ヴィクラムの墜落地点(11月11日撮影)。緑の点はヴィクラムの破片(確認済みのものと可能性のものを含む)で、青い点が衝突の影響で土壌が乱された痕跡を示している。「S」と書いてあるのは、アマチュア天文家のSubramanian氏が発見した破片を締めている (C) NASA/Goddard/Arizona State University

ヴィクラム発見の経緯
ヴィクラムは今年9月7日、南極点から約600km離れた台地を目指して着陸に挑んだ。しかし、着陸の直前に通信が途切れ、以来行方不明となっていた。
その後NASAは、月探査機LROのカメラを使い、着陸予定地域の周辺を撮影し、ヴィクラムの状況を調べていた。LROは、現在運用中の月探査機のなかで最も高い空間分解能(地表をどれくらい細かく見られるかという指標)をもつ。
その画像は研究者だけでなく、広く一般にも公開され、ヴィクラムを探そうというキャンペーンが行われた。そして10月4日、インド在住のShanmuga Subramanian氏が、9月17日にLROが撮影した画像から、ヴィクラムらしき破片を発見した。ちなみにSubramanian氏の本業はソフトウェア技術者で、ISROとは関係のない、アマチュア天文学者だという。
それを受けNASAは、それまでに撮影していた画像と、また10月14日と15日、そして11月11日に新たに撮影した画像と合わせて詳しく分析した。
その結果、ヴィクラムは、南緯70.8810度、東経22.7840度、標高834mの地点に墜落したと判明。さらに、その周辺には機体が分解して発生した破片や、飛び散った破片などによって月面の土壌が乱された痕跡も見つかった。
LROに搭載されているLROC(Lunar Reconnaissance Orbiter Camera)というカメラは、最高で50cmの空間分解能を誇る。しかし実際は、軌道や太陽光の当たり方などによってこれより劣化することが多く、そもそもヴィクラムの寸法は2.5m×2.0m×1.2mであり、仮に原形を保ったままだとしても数ピクセル、もし墜落の衝撃で細かく分解していれば、その破片が1ピクセルとして写るかどうか、というかなり厳しい条件だった。
NASAによると、Subramanian氏が最初に破片を発見した画像は、空間分解能1.3mであり、そこにわずか1ピクセルとして破片が写っていたという。その後、11月にNROが改めて撮影したものは、空間分解能が0.7mまで向上しており、太陽光の当たり方の条件もよく、最も大きな破片は2×2ピクセル、さらに同時に1ピクセルの影も写り、その存在がはっきりと確認できた。
NASAは「ヴィクラムは失われたことがわかりましたが、それでも、地表近くにまで達したことは驚くべき成果でした」と、ISROを讃えている。
またSubramanian氏はツイッターで、LROのミッション・チームからお礼のメールが届いたことを明らかにしている。
-
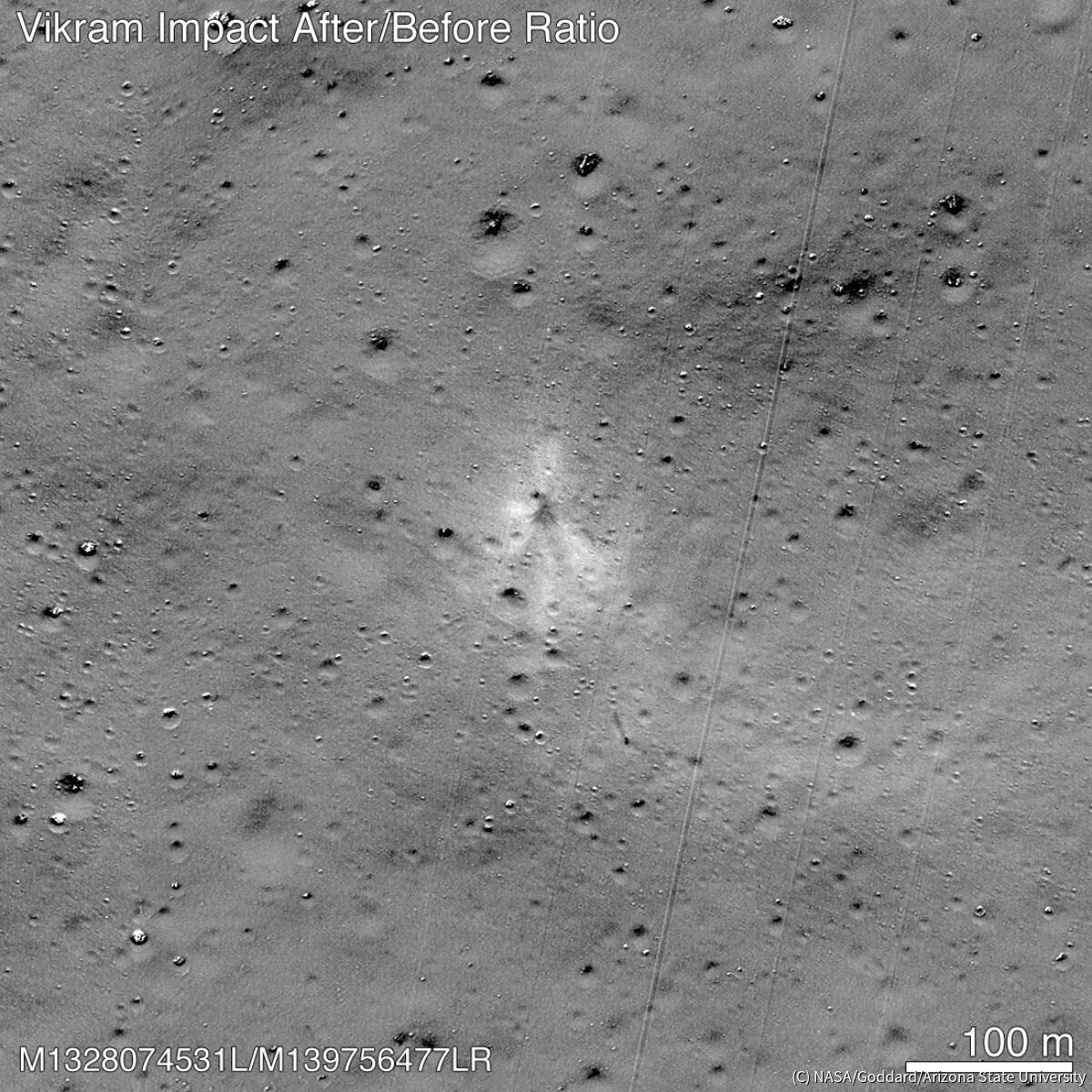
NROが撮影した、ヴィクラムの墜落地点の画像。墜落前後の画像をかけ合わせ、地表の変化を強調させる画像処理が行われている。画像中央が墜落地点で、青い点が衝突の影響で土壌が乱された痕跡を示している。「S」と書いてあるのは、Subramanian氏が発見した破片を示している (C) NASA/Goddard/Arizona State University

-
ヴィクラムの墜落の前と後の、月の地表の変化の様子を示したGIFアニメーション (C) NASA/Goddard/Arizona State University
月着陸を目指したヴィクラムとは?
ヴィクラムはインド初の月面着陸を目指した探査機で、同国にとって2回目の月探査ミッションとなる「チャンドラヤーン2」の着陸機として開発された。
チャンドラヤーン2は、月を周回する「オービター」とヴィクラム、さらにヴィクラムに搭載した月探査車「プラギヤン(Pragyan)」からなる。
オービターは、先代の月探査機「チャンドラヤーン1」が月の南極などに水(氷)がある可能性を見つけたことを踏まえ、氷の場所や埋蔵量などをより詳しく調べることを目的としている。そしてヴィクラムとプラギヤンは、将来の月面での活動を見据え、月面着陸や月探査車の技術を実証するとともに、月の内部物質などを探査することを目指していた。
チャンドラヤーン2は、日本時間2019年7月22日18時13分(インド標準時同日14時43分)に打ち上げられた。地球周回軌道への投入後、エンジンを噴射して軌道を徐々に上げ、8月20日に月周回軌道への投入に成功した。
そして、観測機器の試験などを行いつつ、徐々に軌道を修正。9月1日には近月点高度119km、遠月点高度127kmの軌道に入り、2日には月面着陸に向け、オービターからヴィクラムを分離した。
ヴィクラムはその後、2回に分けた軌道離脱噴射を行い、4日には月面に向けて降下を開始した。しかし7日、月面からの高度が2.1kmに達したところで、ヴィクラムからの通信が途絶。その後の調査で、降下中に不具合が起き、エンジンによる減速が間に合わず月面に激突したと考えられている。
ヴィクラムは質量1477kgで、月の地震(月震)を測る地震計のほか、月面の熱特性を測る熱プローブ、月面のプラズマの密度や変動を測定するラングミュア・プローブ、そしてNASAが提供した、地球と月の距離を計測するレーザー反射鏡といった観測機器を装備している。
プラギヤンは26kgで、ヴィクラムに搭載された状態で月に着陸し、展開されたスロープを降りて月面へ走り出す。車輪は6輪で、走行速度は秒速約1cm、ミッション終了までの走行距離は500mほどになると見積もられている。観測機器は、岩石の元素組成を調べるための「アルファ粒子X線分光分析器(APIXS)」と、レーザーを岩石に当てて元素組成を分析する「レーザー誘起ブレイクダウン分光器(LIBS)」を搭載している。
ヴィクラムもプラギヤンも電力は太陽電池で生成するが、月の夜を越えるための装備はなく、月の1日のうち昼間にあたる、14地球日のみ稼働するように造られていた。
月からのサンプルリターンでインドと日本が協力
ヴィクラムが着陸を予定していたのは、月の表側の南緯70.9度、東経22.7度の地点で、ここは「マンチヌスC」と「シンペリウスN」という2つのクレーターの間にある台地にあたる。ここは南極域、もしくは南極の端のあたりといえる場所で、水があるとされる南極点付近からはかなり離れているものの、これまで月に着陸した探査機のなかでは、最も南極に近い場所だった。
また、この場所は月の裏側から南極にかけて広がる、「南極エイトケン盆地」の表側にある縁から約350kmしか離れておらず、過去に巨大天体の衝突で南極エイトケン盆地が生成された際に飛び散った、当時の月の内部物質を直接探査できる可能性もあった。
ヴィクラムの着陸は失敗に終わったものの、オービターの運用は順調で、今後約7年間にわたる探査が予定されている。オービターには、水を探す機器のほか、光学カメラやX線分光器、大気を分析するための質量分析計の一種である四重極型質量分析計などを搭載。月面から高度約100kmの、月を南北に回る極軌道を周回している。
また現在、インドではチャンドラヤーン2の後継機として、月の南極から石や砂などを地球に持ち帰ることを目指した「チャンドラヤーン3」の検討が進んでいる。このミッションは日本と共同で行い、打ち上げは2020年代前半ごろに予定されている。
-

打ち上げ前のヴィクラム。台形状の部分がヴィクラムで、そこに探査車プラギヤンを搭載する (C) ISRO

出典
・Vikram Lander Found | NASA
・Shan(@Ramanean)さんのメディアツイート / Twitter
・GSLV-Mk III - M1 / Chandrayaan-2 Mission - ISRO
・Chandrayaan2 Latest updates - ISRO
・Launch Kit at a glance - ISRO