民間月面探査チーム「ハクト」とKDDIは3月23日、オフィシャルパートナー契約の締結を発表。月面レース「Google Lunar XPRIZE」(GLXP)に参加しているハクトに対し、KDDIが資金提供(金額は非公開)ならびに技術協力を行っていくことを明らかにした。資金的な見通しが立ち、世界初の民間月面探査の実現に向け大きく前進した。

|

|
|
KDDIの田中孝司社長(左)と「ハクト」の袴田武史代表(右) |
4輪型ローバーの最も目立つ場所に「au」のロゴがあった |
GLXPは、民間による月面開発を促進することを目的とし、2007年に開始された賞金レースである。勝利条件は、「月面を500m以上移動して、HD画像を地球に送信する」こと。現在、世界中の16チームがエントリーしており、その中の唯一の日本チームがハクトだ。レースの期限は2017年末に設定されている。

|

|
|
現在残っているチーム。どんどん減って今は16チームに |
GLXPのミッション。優勝チームへの賞金は2000万ドルだ |
このミッションを達成するために、非常に重要になるのが通信技術だ。月面で通信トラブルが発生したら、ローバーの制御ができなくなるし、画像の送信もできなくなってしまう。安定した通信は勝利に不可欠だ。通信のプロであるKDDIは、ハクトにとって、理想的なパートナーであると言えるだろう。
しかし、「なぜKDDIが月に?」とは、誰しもが思う疑問だろう。これに対し、KDDIの田中孝司社長は、「新たなる挑戦だと思っている」とコメント。KDDIは50年以上前に、日米間の衛星テレビ中継を初めて実現した企業。地球を飛び出し、月面からの映像を中継するのは、これに続く大きなチャレンジと位置付ける。
今回、KDDIは「月面通信」と「動画・静止画伝送」の2点で貢献していくという。

|

|
|
KDDIの役割(その1)は、月面での安定した通信を実現すること |
KDDIの役割(その2)は、映像を高精細なまま地球に送信すること |
ハクトのローバーは、米Astroboticのランダーに相乗りして月面に到達(参考記事:民間月面探査チーム「ハクト」が計画を発表 - 2016年後半にFalcon 9で打ち上げへ)。地球との通信はこのランダーを経由することになるが、まず最初の課題は、どうやってローバー/ランダー間の通信を途切れさせないようにするかということだ。
地形の起伏により、ローバーが隠れて見えなくなる可能性がある。走行して傾けば、アンテナの向きも変わる。月面では、電波の回折や反射が地球とは異なり、電波の飛び方の予測が難しい。走行中にレゴリスが舞い上がると、成分によっては通信に悪影響を及ぼす恐れがある。こういった様々な課題を解決しなければならない。
ハクトのローバーは、より高速な2.4GHz帯と、より遠くまで届く900MHz帯の両方に対応するハイブリッド通信システムを搭載する計画だ。すでに、KDDI研究所内にある電波無響室を使って、アンテナパターンの測定を実施。電波ロスが少なくなるように、2本のアンテナの長さや設置場所を変更したという。

|

|
|
月面は地球とは全く異なる環境。電波がどう飛ぶかよく分からない |
電波無響室の試験でアンテナを検証。最適な長さと位置を割り出した |
そしてもう1つの課題は、月面との間の通信帯域がかなり細いことだ。良くても100kbps程度しかないと見られており、KDDIは、この低スループット環境でも高解像度の映像が送れるよう、解像度、フレームレート、画質の最適解を見つける。なお映像圧縮技術には、H.264エンコーダを使用するという。

|

|
|
映像の伝送にはH.264エンコーダを使い、最適なパラメータを探す |
データは欠けるのが前提になるので、受信側で画像復元を行う |
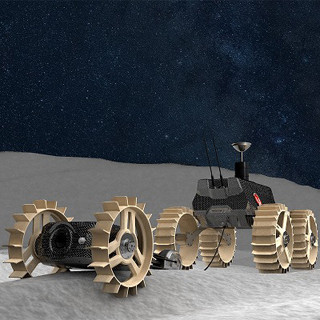
さて、肝心のローバーについて、最新状況をお伝えしよう。今回、デモ走行が披露された機体は、4輪型ローバーのPFM3(3台目のプリフライトモデル)と呼ばれる最新の試験機。銀色のボディが目を引くが、これは放熱のため、FM(フライトモデル)では銀テフロンコーティングが施されるからだ(PFM3は銀では無くアルミ蒸着)。
|
今回、PFM3(プリフライトモデル3)の走行が初めて公開された |
また軽量化のために、カメラも変更されている。PFM1までは、上面に全方向カメラが搭載されていたが、PFM3は4方向それぞれに小型カメラを配置。また前面のレーザーレンジファインダは、赤外線を使ったTOFカメラに入れ替わっている。
ハクトは4輪型のほか、2輪型のローバーも開発しており、2台を連結したデュアルローバーシステムも考えられていたが(参考記事:民間月面探査チーム「ハクト」が走行試験を公開、縦孔探査のデモも)、現在は4輪型のみの構成をベースに開発が進められている。4輪型のみの場合、打ち上げ費を含めたトータルコストは10億円程度になる見込みだ。
今回のKDDIとのオフィシャルパートナー契約により、資金的には「まだ100%ではないが、かなりメドは立った」(ハクトの袴田武史代表)という。もし資金が足りなければ、2輪型になる可能性もあったが、ほぼ4輪型で行けそうということで、これでようやく、開発に専念できるようになりそうだ。

|

|
|
月面でこんなシーンが見られる日も近い? 期待したいところだ |
こちらが前方になる。上面には4方向にカメラが設置されている |

|

|
|
相対的に車輪が大きい印象だが、これは走破性を重視しているため |
これは後ろ側。ボディも車輪も全て銀色であることが分かる |
今後のFM開発で、ポイントになりそうなのは軽量化だ。ローバーが重くなると、ランダーへの相乗り料金もそれだけ増えてしまう。先ほどの10億円というのはローバーが4kgになる想定のため、現在よりもさらに半減させる必要がある。PFMでは省略されていた太陽電池も搭載する予定であり、決して簡単ではない。
ただ、「PFMは安全側に余裕を持たせて作ってあった」(ハクトの技術リーダーである東北大学の吉田和哉教授)とのことで、4kgへの軽量化についてもメドは立っているそうだ。FMの設計はすでに開始されており、今年の夏頃にも公開できそうだという。ぜひ楽しみに待っていて欲しい。

|
|
auのCMに出演中の有村架純さんからの応援メッセージも。月から来たかぐや姫の設定なので、「かぐちゃんも喜ぶ」とコメント |