産業技術総合研究所(産総研)による、「デジタルヒューマン・シンポジウム2013」が3月8日に日本科学未来館で開催され、その終了後、産総研 臨海副都心センターのデジタルヒューマン工学研究センター(DHRC)において、オープンハウスが開催されたので(画像1)、ロボットテクノロジーを中心にその展示内容を紹介する。

|
|
画像1。ヒューマノイド(2足歩行)ロボットの自律移動などが研究されており、段差を歩行する様子などが披露された |
今回は、新型のロボットはなかったのだが、まずはちょっとレアなロボットから紹介。今となってはあまり見られない、産総研と川田工業が開発したヒューマノイドロボットの「HRP-3 PROMET Mk-II(プロメテ マーク2)」である(画像2・3)。プロメテ マーク2は2007年6月の発表で、2003年3月発表の「HRP-2 PROMET(プロメテ)」(画像1)に引き続き、メカ・キャラクターデザイナーの出渕裕氏がデザインしたことで有名な機体。

|

|
|
画像2。プロメテ マーク2。全身ホワイトで、ヒーローロボットっぽい。実際に2台しかないので、主人公メカっぽい |
画像3。プロメテ マーク2の顔のアップ。ガンダム作品に出てきてもおかしくないが、バイザーがあるので量産型タイプの顔 |
HRPシリーズとしては、その後に開発された女性型ロボット(サイバネティックヒューマン)「HRP-4C 未夢」(2009年3月発表:画像4)が有名で、その技術をフィードバックした最新の量産機「HRP-4」(2010年9月発表:画像5)が川田工業から発売されているので、プロメテ マーク2はもはや"懐かしい"機体に入りつつあるのだが、実は2台しか存在せず、意外とレア度が高かったりする。
HRP-3の1台は臨海副都心センターにあるのだが、毎年開催される同オープンハウスでいつも見られるとは限らない。今回は写真撮影用ということで、プロメテの6号機と、2001年に披露されたヒューマノイドロボットとしては初期型の「JSK-H7」(東京大学大学院情報処理工学系研究科/東京大学工学部機械情報工学科の情報システム工学研究室が中心となって開発された)と一緒に展示されていた(画像6・7)。

|

|
|
画像4。未夢。機能面でも強化されているが、外面も少しずつ改良されており、発表当初よりも腰回りが細くなるなど、進化中 |
画像5。HRP-2に変わる量産型ロボット。デザインは、園山隆輔氏が担当 |

|

|
|
画像6。DHRCの2台目のプロメテ(6号機)。画像1の機体は12号機 |
画像7。HRPシリーズとは少し系統が異なる初期のヒューマノイドロボットのJSK-H7。クレヨンしんちゃん眉がかわいい |
プロメテは約20体が日本中にあり(フランスにも1台)、科学系展示施設でも展示されていることから実際に見た人も多いと思われるが、プロメテ マーク2はなかなか見られない。筆者も実は直接見たのは初めて。ちなみに、臨海副都心センター1階の展示施設には、ホンダの「P3」(画像8)と兄弟機に当たる「HRP-1」(カラーリング以外に、微妙に各部の形状が異なる)が展示されており(画像9)、いつでも見学可能だ。
ちなみに、このほかのHRPシリーズには、プロメテのプロトタイプの「HRP-2P」、プロメテ マーク2のプロトタイプの「HRP-3P」(画像10)などがある(HRP-4シリーズのプロトタイプはあるとは推測されるが、「HRP-4P」という機体は公表されていない)。HRP-2Pのみまだ直接お目にかかったことがないので、その内、がんばってコンプリートしたいと思う。

|

|
|
画像8。ホンダのP3(1997年発表)。この後に幻の機体P4(現在はツインリンクもてぎで展示中)があって、ASIMOとなる |
画像9。P3と兄弟機のHRP-1。発表は2002年4月。HRP-1はハード、ソフト共にホンダ製だが、ソフトだけ産総研製の「HRP-1S」もある |

|
|
画像10。プロメテ マーク2のプロトタイプ。2005年9月発表 |
なおプロメテだが、前述したように2003年3月(12日)発表なので、なんと10周年。DHRCの副研究センター長の加賀美聡博士によれば、「プロメテがとても頑丈なのことには驚いてます。もちろんメンテナンスはきっちり行っているのですが、10年も現役でがんばってくれるとは思わなかったです」という。前述したフォトセッション用の6号機は、最近、新型を購入したことから必要がなくなったというとある大学から譲り受けたそうで、ちょっと変わったエンドエフェクタが装備されているのが特徴(画像11)。

|
|
画像11。画像12と比較してもらうとよくわかるが、同じプロメテでも手の形は全然異なる |
また、まだまだロボットの歩行・自律移動などの研究の実験機としてバリバリの現役機なので、DHRCでも活躍中だ。今回は、ちょっと調子が悪かったようで(見学者が多いと、なぜかロボットや機械類も緊張することが多い)、本来なら段差を乗り越えたりといったデモを繰り返し披露する予定だったが、1回ぐらいしかできず。ちょうどタイミングが悪く、きっちり動いているところは見られなかった。
ちなみに、このデモ要員のプロメテは以前からDHRCにいる機体の12号機で、腹部のレーザスキャナが特徴(画像12・13)。そのほか、モーションキャプチャでお馴染みのマーカーが付けられている。個人的にプロメテの全機がどこにいるのかを調べてみたいので、その内に機会があったら紹介したいと思う。

|

|
|
画像12。この腰部のレーザスキャナは画像11の6号機にはない |
画像13。プロメテ12号機が各種センサを用いてとらえている外界の様子 |
なお、今回のデモはどのようなものだったのかというと、1つが「ヒューマノイドの自律移動を実現する技術群」である。環境認識、運動計画、歩行制御、複合現実(MR)提示、基盤技術などが解説されていた。その中のMR提示に関連する技術が、「自律行動ロボットソフトウェア開発のための複合現実感環境」で、産総研とキヤノンが共同開発している。ロボットの環境認識・行動計画などの内部状態を、MR技術を用いて実世界に座標を合わせて投影することにより、自律行動システムの挙動を直感的に把握できるようにし、システムソフトウェアの効率的な開発・デバッグ・検証を実現する、というものである(画像14)。

|
|
画像14。MR映像。画像1を別角度から見たものに、テクスチャーが貼られている |
最近は展示会でも見かけるようになってきた作業用ロボットに、川田工業の上半身型の複数台で連携できる双腕ロボット「NEXTAGE(ネクステージ)」がある(画像15)。それを活用した、「ロボットハンドの最適設計と重心を考慮した把持計画」という研究が紹介されていた(動作デモは不調のために見られず)。実は、物体を持ち上げる際、現在の画像認識技術などを駆使すれば、単純な形状なら重心位置を見極めることは比較的できるようになってきているが、複雑なものだと、まだまだ難しいという。今回のエンドエフェクタは、親指に当たる1本と、それ以外の2本が対向している3本指タイプだ(画像16)。
3本指タイプは安定した状態でつかめるのだが、人間なら余裕でできるエンピツなどを片手だけで回転させる(向きを変える)といった作業ができないため、そうするには4本指が望ましいという。なお、親指と同様のほかの指と対向している(対向できる)指は絶対に必要だが、現状、ロボットハンドで小指までは必要ないそうである。小指が必要とされるほどの細かい作業まではできないというわけだ。こういうとき、改めて人間の優秀さを感じてしまうのである。

|

|
|
画像15。ネクステージ。3台による部品の受け渡しといった作業を連携して行える。 |
画像16。ネクステージに取り付けられたエンドエフェクタ |
ヒューマノイドロボットの全身を操作する(動作指示を行う)ための装置として、ホビーロボットサイズのヒューマノイドロボット型ヒューマンインタフェースも展示されていた(画像17)。この研究を行っているのは、かのリアル搭乗型ロボット「クラタス」にも操作用ソフトウェアとして利用された「V-Sido」の開発者の吉崎航氏である(V-Sidoもこの研究の一部である)。
それから、マイクロソフトのゲーム機のXbox 360の周辺機器「Kinect」が、ロボット研究でもセンサとして引っ張りダコなのだが、今回も利用されていた。ロボット関係では「サービスロボットのための人環境情報地図の構築」に使われており(画像18・19)、そのほかロボット技術ではないが、「少数の計測項目からの全身の人体寸法推定」でも利用されていた。
レーザスキャナがあればKinectはいらないように思うかも知れないが、実はどちらも一長一短があって、お互いを補っている。レーザスキャナはある程度遠くまで情報を得られるが、レーザスキャナが設置された高さしか見られない。一方で、Kinectは上下方向にも広角度にセンシングするし、さまざまな機能があるので人がどのようなポーズをしているかといったこともわかる。ただし、Kinectは近距離でしか仕えないのが弱点というわけだ。
そのほか、周辺環境を計測する技術を披露するプラットフォームの1つとして、車輪型の移動ロボットも展示されていた。レーザスキャナで周囲の環境を計測し、モニタに映していた(画像20)。

|

|
|
画像17。ヒューマノイドロボット型ヒューマンインタフェース |
画像18。Kinectを搭載し、レーザスキャナと組み合わせて周辺環境を認識 |

|

|
|
画像19。人が座っている、立っているといったことをKinectで認識し、もっと遠いエリアや後方などはレーザスキャナで確認。2つの情報を融合している |
画像20。ゴツい感じのタイヤを履いているので、屋外での研究などにも使われると思われる移動型ロボット |
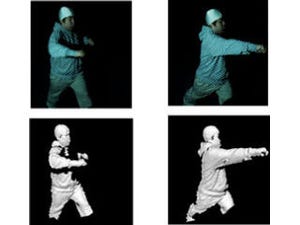
そのほかロボット関係以外で面白かったのは、「非剛体変形位置合わせによる運動物体の全周モデリング」(動画1)。動画を見てもらえればわかるが、一部の人体などの3D形状データしか取得できなくても、補完して3Dモデルを作製するという技術である。
| 動画 | ||
|---|---|---|
 |
||
|
もう1つ面白かったのは、画像は残念ながらパネルのみなのだが、「プロ野球投手の投球フォームの生体力学的エネルギー解析」というもの(画像22)。46歳のベテラン投手と2年目の若手投手に実際にDHRC内で投げ込んでもらってモーションを撮影し、その比較などの調査を行った結果だ。46歳の投手自らが、自身が大きなケガもなく、長い現役生活を続けていられる理由を科学的に解き明かし、後輩に伝えたい、ということで産総研に依頼して行われた研究で、その一端がわかったという。
46歳の投手は、無駄なく足腰も含めた全身を使った投球をしており、肩やヒジなど腕部への負担が少ないことが判明。2年目の若手投手は、計測を行ったのがDHRCの屋内なので、マウンドがないということもあるだろうが、腕力に頼っている傾向だという。ここら辺に、46歳の投手が大きなケガもなく長持ちした理由と、世の中には故障しがちな投手もいるという理由ではないか、ということである。

|
|
画像22。「プロ野球投手の投球フォームの生体力学的エネルギー解析」のパネル |
デジタルヒューマン・シンポジウムとDHRCオープンハウスは、毎年3月に行われており、特にオープンハウスは夕方からなので、都内ということもあって、時間がないという方でも足を運びやすい。ロボット関係も多く、無料で見学できるので、興味のある方はぜひ一度直接ご覧になっていただきたい。