日立エンジニアリング・アンド・サービスは、原子力発電所(原発)の災害対応において建屋内作業の支援を目的とした小型双腕重機型ロボット「ASTACO-SoRa(アスタコ-ソラ)」を、日立建機と共同で開発したことを発表した。
現在、福島第一原子力発電所の建屋内作業現場では、高い放射線環境下において遠隔操作で作業環境の調査・測定などを実施するロボットが投入されているが、今後はこれに加え、がれきの撤去、機材の搬送、遮蔽体の設置などを行うロボットの必要性が高まってくることが予想されており、同ロボットはそうしたニーズに対応することを目指して開発された。
解体作業や災害救助支援などで実績のある日立建機の双腕重機「ASTACO」と、日立エンジニアリング・アンド・サービスの原子力施設における遠隔操作技術を融合することで、広汎な作業に対応しつつ、機体を980mm(~1280mm:クローラ可変)×1570mm×1500mm(アーム込み最低)のサイズに抑えることに成功。狭い通路でも走行できるほか、2本のアームを装備することで、自由度の高い作業が可能となった。アームは2.5mまで到達可能で、それぞれ最大150kgの重量物を取り扱うことが可能なほか、アーム先端のツールは交換が可能で、掴み具・切断具・回転具・カメラ付長尺アームの取り付けが可能。これらの各種ツールは遠隔操作で交換が可能(カメラ付長尺アームを除く)なほか、カメラ付長尺アームを用いた場合、最高6.5mの高さの環境調査や測定を行うことが可能だ。
さらに線量率計および酸素水素濃度計を搭載しているため、建屋環境を常時モニターすることが可能で、これらのデータを無線でやり取りする遠隔操作を行う操作盤側のHDDに保存することができる。
この無線式遠隔操作用操作盤により、運転操作員は、ロボットに搭載した6台のカメラによる映像を操作盤のモニターで見ながら、ロボットの操作を行うこととなるが、ロボットには、レーザー距離計によりロボットと作業対象物との距離を確認できる機能やレーザー光により、前方に車幅を投影し、通路幅との関係を視認できる機能、ボディおよびアームを任意の位置から自動で決められた位置(原点)に復帰できる機能が操作員のサポート機能として搭載されている。
なお、2社では今後の予定として、2013年からの福島第一原子力発電所での活用をめざし、模擬設備による、運転操作員の訓練を進めていくとしている。

|

|
|
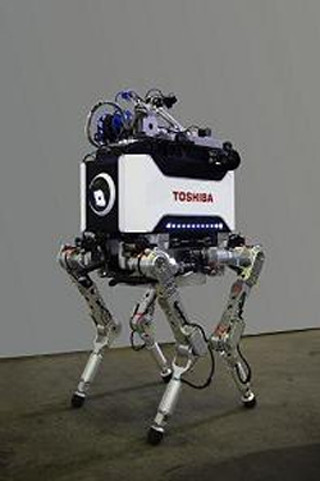
ASTACO-SoRaの外観 |
ASTACO-SoRaを操る操作盤。通常は無線操縦だが、緊急時は有線操作も可能 |