そしてアメーバ班が掲げるのは、「アメーバ型分子ロボット実現のための要素技術開発とその統合」だ。
アメーバ班では、アメーバ型の分子ロボットとして、分子モータ群を備えたサブマイクロスケールの人工リポソームの研究開発を行う(画像25~27)。具体的には、感覚班の開発するDNAチャネル構造によりセンシング情報を入力し、それを知能班の開発する情報処理回路によって識別・増幅し、「微小管伸長」などの分子モータ群を起動・制御して目的の運動を創発させる形だ。すなわち、特定配列を持つDNA断片などをセンシング対象として、その外部濃度の変化に応じた仮足伸長運動の発現を目標とする。

|

|
|
画像25。アメーバ班の位置づけ。研究としては2つの班に分かれて同時進行だが、アメーバ型を発展させたものがスライム型である |
画像26。アメーバ班の研究計画。DNA制御・分子モータ走向、細胞膜形状変化、感覚知能およびインタフェースの3部門に別れて2014年度末まで研究を進め、2015・2016年度に統合してアメーバ型分子ロボットの開発を目指す |

|

|
|
画像27。アメーバ型分子ロボットの開発の準備状況の一覧。アメーバ班の研究者それぞれが、アメーバ型の開発の基礎になるであろうさまざまな研究で成果を出している |
画像28。アメーバ班のメンバーの研究例。豊田准教授の「細胞様油滴運動」のプレゼン画面 |
センシングデバイスで得た分子情報をリポソーム内で処理するために、1つ目に感覚班の作成するDNAチャネル構造をリポソーム膜内に埋め込む技術、2つ目に知能班の開発するDNA情報処理回路をリポソーム内に実装する技術を開発していく。
これにより、分子ロボット外部の濃度情報がリポソーム内に伝達され、一定の情報処理を経てリポソーム内にアクチュエータ駆動用のDNA濃度場を形成。それを駆動入力として、3つ目の適切なDNA修飾を施した分子モータ群(微小管束および微小管アスターなど)を制御する技術を開発し、リポソームの突起(アメーバ仮足)を伸長させる運動を発現させるのである。
より高度な方向性制御を実現するため、4つ目の分岐構造などを含むペプチド型の分子モータを開発。また、5つ目のこれらの分子モータ群をDNAナノ構造体を用いて構造化することにより、伸長運動を増幅する技術の開発する。
さらに6つ目として、リポソーム膜面上に分子モータ群をアンカーするタンパク質を発現させ、膜面上の相転移現象を利用してモータ群の方向を制御する技術も開発していく。そして最後に7つ目として、これら一連の反応系を設計するため、膜分子およびラフト構造の自己組織化シミュレーションシステムを開発する次第だ。
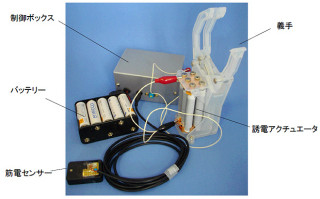
スライム班は、「構造化ゲルと化学反応場の協働による運動創発」を掲げる。今回の研究では、分子ロボット開発のための基礎研究を行うスライム型ロボットは、性質の異なるゲルを微細に構造化した「ゲルアクチュエータ」(画像29・30)をボディとして持つ分子ロボットだ。

|

|
|
画像29。自励駆動するゲルアクチュエータ |
画像30。異方性ゲルの開発 |
感覚班のセンサからの入力や知能班の回路出力を初期刺激としてボディ内に化学反応場を形成することにより、アクチュエータを収縮膨張させ、目的の運動を創発させる。
具体的には、特定の化学物質の濃度勾配を感知し、濃度の大きい方向へ泳ぐ蠕動(ぜんどう)運動などの実現を目標とするそのため、異方性や階層性を持つゲルアクチュエータを自己組織化によって生成すると共に、ゲルアクチュエータに知能班の作製する分子情報処理回路の計算機能、および燃料となる分子のプール機能を付与し、感度と運動能力を高めるための精密分子設計を行う。
さらに、DNA分子入力信号およびゲルアクチュエータの動特性を考慮した高次構造を創製し、その「レオロジー制御技術」を開発する。また、光によるゲルアクチュエータの直接的な制御のために、光駆動型DNAゲルの開発を行っていく計画だ。
知能班の開発するDNA回路により非線形時空間振動をプログラムし、ゲル空間内で非均質場を生成することにより、アクチュエータの異方性駆動を実現する。このため、運動素の動的分布、例えば3次元らせん反応場を設計するアルゴリズムを開発していく。
また、ゲル構造の変形のために、部材の伸縮だけではなく、脱構築(ゾル化)・再構築(ゲル化)を繰り返して、構造そのものの形状を変えていくためのアルゴリズムを開発するとしている。
それから、分子ロボットの進化シナリオに関しても抗争が披露された。現在は、分子スパイダーと呼ばれる第0世代の分子ロボットがすでにあるわけだが、今回の計画では、第4世代までが考えられている(画像31)。分子ロボティクスの発展プロセスとして、生物の進化と相似な幾世代かを経て、最終的には電子技術と融合するという構想が披露された。

|
|
画像31。分子ロボットの第0世代スパイダー(すでに開発済み)から第4世代のハイブリッド型までの発展図(画像9と同じだが資料PDFからイラストを抜粋) |
第1世代のアメーバ班が開発する計画であるアメーバ型(画像32)では、単分子型分子ロボットの限界を乗り越えるために、ミクロンサイズの容器を人工的に合成し、その中に情報処理や運動のための分子デバイス群を統合することで、単分子反応のランダム性を逃れ、反応速度論に基づく決定論的な機能設計を実現していく。
スライム班が開発する計画の第2世代のスライム型(画像33)では、機能性の高分子ゲルを素材として反応場をスケールアップし、その上に発現する非均質な時空間的発展の中でさまざまな分子デバイス群を動作させることにより、走性のような異方性を必要とする機能を発現させる計画だ。
そして第3世代の「多胞型」(画像34)では、異なる機能をプログラムしたコンパートメントを多数合体させ、単一胞では不可能な複雑性を実現するという。
現段階の構想の最終段階である第4世代のハイブリッド型(画像35)では、人工的な化学反応系としてプログラムされる分子ロボットを電子デバイスと融合させることにより、生化学的な反応の限界を突破するとしている。

|

|
|
画像32。第1世代のアメーバ型のイメージ図。今回開発予定の1つ |
画像33。第2世代のスライム型のイメージ図。今回の研究ではこの開発がゴール地点となる |

|

|
|
画像34。今回の5年間以降の研究で実現すると思われる、第3世代の多砲型 |
画像35。現時点の計画では、最終形態となっているハイブリッド型 |
具体的な成果の披露は5年後を予定
同学術領域の目的は、このような分子ロボティクスの発展ビジョンへ道筋をつけ、ボトムアップ的なものづくりへ向かう技術革新を加速・先導することであるとした。
さらなる将来展望としては、分子ロボットの応用として、医療へはドラッグデリバリー、血管・骨再生、幹細胞分化などを挙げる。環境に対しては、超高感度分子検出、極限環境の浄化などだ。
また、分子ロボティクスは生体を超える機能実現のためのキーテクノロジーとして、生命と分子ロボットの融合体の実現や、地球生命由来の生体高分子の制約を離れ、最適設計したプログラマブル高分子を素材とする普遍的方法論に発展させることも掲げられた。
この分子ロボティクスが計画通りに進展すれば、確実に世界は変わることは間違いないので、このそうそうたるメンバーによる動向に注目していただきたい。平成29(2017)年3月には、確実な進展のもとに報告がなされると思うので、今から5年後の成果を楽しみに待とう。