三重大学工学部機械工学科矢野(メカトロニクス)研究室・アクティブギプス
三重大学工学部機械工学科メカトロニクス研究室が開発している装着型ロボットが、上肢支援ロボット「アクティブギプス」だ(画像38)。手首に近い先端部分にセンサがあり、それで装着者が操作できる。ベースとなるアウターパーツの内側にソフトインナーを組み合わせることでさまざまな人の腕の形状に対応させる仕組みだ。

|
|
画像38。上肢支援ロボット「アクティブギプス」。これは7号機で、「カメレオン」という名称がある |
アクティブギプスは、下肢麻痺による車いすの利用者などを対象としており、移動のための車いすの車輪を回したり、車いすからベッドなどへの移乗したりする際に腕力を支援することを目的としている。
国立障害者リハビリテーションセンター研究所・筋電義手
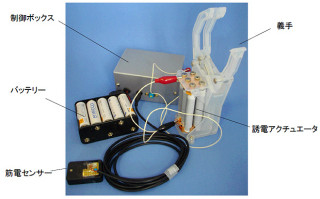
国立障害者リハビリテーションセンター研究所は、複数の技術を披露した。その1つが、「筋電義手」(画像39)。今やそれほど珍しくはない技術ではあるが、健常者が体験するための筋電義手も用意されており、腕に装着して実際に五指を閉じたり開いたりといったことを体験できた。

|

|
|
画像39。筋電義手。左が健常者の体験用のモデルで、右が実際に障害を持つ人のためのもの。人の手先ほど器用にはまだ動かせないが、物をつかむのはかなり容易に行えるため、通常の義手と比べたら非常に生活が便利になるはずだ。ただし、まだ重たいのが課題 |
画像40。内側に見える電極で筋電をキャッチし、その指示に従って手を閉じたり開いたりする |

|
|
画像41。指先。かなりリアルに造形だ |
また、「指文字用触手話ロボット」も展示(画像42)。視覚と聴覚の二重障害を持つ盲ろう障害者の内、最初は聴覚障害だけだったところに、糖尿病などで後から視覚障害を持つに至った場合、コミュニケーションの手段として聴覚障害のみの時に手話を学んでいるため、自分の意思を伝えることはできても、他者の手話を読み取れなくなってしまう。そうした場合、手話を触って理解する「触手話」が使われるようになる。

|
|
画像42。触手話を用いて盲ろう者に情報を伝達する「指文字用触手話ロボット」。ただし、まだプロトタイプであり、こうしたロボットが実際に役立つか、またどうすれば役立つロボットになるかといったことを検証中 |
誰でも情報は欲しいわけで、中でも盲ろう者の場合、なかなか自分ひとりでの情報収集が難しい。触手話を使える人を頼めるとしても、自分だけで調べたいプライバシーに関わるような情報もある。そこで、こうしたロボットが活躍してくれれば、より盲ろう者の情報収集に関する利便性が増すというわけだ。
また、「ブレインマシンインタフェース型環境制御システム」(画像43)やNECのコミュニケーションロボット「パペロ」を使った高齢者向けの情報伝達を目的としたシステム(画像44)なども展示やデモを行っていた。

|

|
|
画像43。「ブレインマシンインタフェース型環境制御システム」。同センターオリジナルのシステムで、これを用いてインテリジェントハウスを制御する研究が行われている。運動機能に障害を持っている場合でも、脳波によってテレビ、照明、ブラインドなどの家の中電化されてシステムにつながれたものはみな制御できるようになる |
画像44。パペロといえば、普段は子どものようなかわいい声で話すのが標準仕様だが、高齢者にとっては甲高い声は聞き取りにくいため、低音の男性の声でしゃべるのがこのパペロの特徴。今回のシステムでは、時間によって日付と今日の予定を伝えたり、薬を飲むタイミングを伝えたりと、その日のスケジュールや安全・安心の管理を行うような仕組みを目指して開発されている |