実際にGITAI S10は、開発開始から半年以内で「技術実証のデモンストレーション」のTRL3相当のすべての実証試験に成功したという。その試験内容は、以下の通りだ。
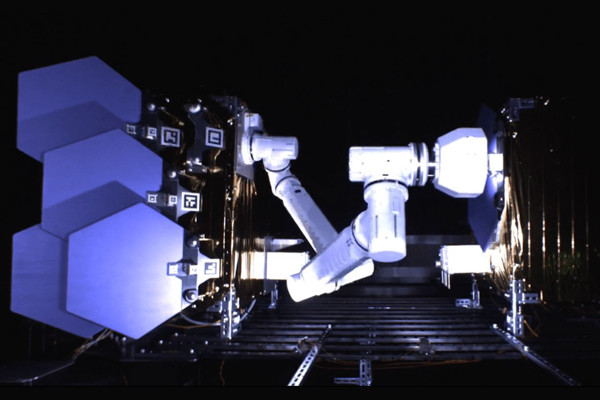
- 宇宙ステーション船外を自ら移動し、点検・修理などを行うことを想定した、グラップルエンドエフェクタと、それと嵌合(かんごう)するグラップルフィクスチャを駆使した、ロボットアームの自律的な移動能力のテスト
- 貨物補給宇宙機とのドッキングや積み荷の取り出しを想定した、グラップルエンドエフェクタとフィクスチャを使った移動体の捕獲・接続テスト
なお、グラップルエンドエフェクタおよびグラップルフィクスチャは、ロボットアームの手先を交換(着脱)可能にするための同社が独自開発したインタフェースのこと。さまざまなツールと接続することで、用途の異なる複数の作業が可能なタスク性能の向上だけでなく、アーム両端に装備することで、アームそのものの自律移動も可能にするという。
GITAI S10は今後、2023年3月にTRL6の達成を目標として、擬似的な無重力環境である水中実験施設にて同様の技術実証試験の実施を予定しているとするほか、GITAI S2に加え、今回のGITAI S10をサービスラインナップに加えることで、多様化する宇宙空間での作業需要に応えていくとしている。
GITAI S10の動作の様子を収録した動画。宇宙ステーションを模した構造物を伝って移動していく様子などを見ることが可能 (出所:YouTube内公式チャンネルGITAI_Hiring in the US)