続いては、いよいよ舘博士のテレイグジスタンスロボットの登場だ。現在、最新作「TELESAR V」はメディアラボのスペースでは展示されておらず、12月中旬からの予定なのは前述した通り。現時点で展示されているのは1989年に開発された初代「TELESAR」(画像25・26)と、2005年に開発されて愛・地球博に出展された2代目「TELESAR II」(画像27・28)の2台だ。
初代TELESARは、この後に紹介するTELESAR Vの直系の先祖という具合の遠隔操縦用のロボットだが、TELESAR IIは相互でテレイグジスタンスを行うために顔やお腹の部分に装着者の顔を映し出せるようになっている点が大きなポイントだ。ちなみにTELESAR IIは愛・地球博でご覧になった方もいるだろうが、初代TELESARは現在ではなかなかお目にかかれない20世紀のロボットの1つ。ロボットマニアにとっては貴重な1台なので、見逃さないようにしよう。

|

|
|
画像25(左):初代TELESAR。工場の機械類のような重量感あふれるボディである。画像26(右):初代TELESARの顔のアップ。初代から立体視できるよう双眼カメラが採用されていた |
|

|

|
|
画像27(左):TELESAR II。その体型のユニークさもさることながら、再帰性反射材と思われるグレーの部分が独特の雰囲気を醸し出している。画像28(右):TELESAR IIの顔のアップ。初代TELESARやTELESAR Vのように双眼カメラがないため、宇宙服のヘルメットのような、もしくはミステリアスな雰囲気が漂う |
|
そして最新機のTELESAR V(画像29)だが、今回は未来館研究棟の舘研究室でデモが披露された。研究棟といっても未来館の建物から独立しているわけではなく、展示フロアよりも上のフロアにある。研究室に行くには、実は一般の来館者からは目立たないようにこっそりと設けられた、展示エリアと展示エリアの合間を縫うような通路を通って、その先のエレベーターを利用する(ただし一般の来館者は研究棟ツアーとかでない限りは利用できない)。
TELESAR Vの最初の発表は2011年の国際ロボット展(正式なプレスリリースは科学技術振興機構と慶応大から2012年7月に共同で出された)。また、TELESAR Vは正確には装着者が代理ロボットを操作するためのコックピット周り一式と、その代理ロボットを合わせたシステム一式(画像30)を指すもので、代理ロボット単体のことをいうわけではない。
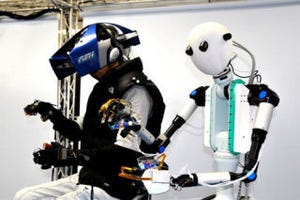
装着者はコックピットに座り、1280×800ドットの解像度を持つヘッドマウントディスプレイを頭部に、グラビティ・グラバーにテクタイル・ツールキットのスピーカー(振動装置)、温度を提示する仕組みを加えたグローブを両手(機能としては親指と人差し指のみ)にそれぞれ装着(画像31)。そしてモーションキャプチャのマーカーを頭や方、手、指などに装着し、スキャナ(画像32)により能動的な身体運動を計測する仕組みだ。

|

|
|
画像29(左):TELESAR V(代理ロボット)の顔のアップ。なんとなく、スタンド(幽波紋)っぽいようなデザイン。画像30(右):装着者と代理ロボット。装着者の装着するガジェット一式、代理ロボット、制御用のPC、装着者の上下に設置されたスキャナなどを合わせてTELESAR Vである |
|

|

|
|
画像31(左):装着者の様子。HMD、グラビティ・グラバー+テクタイル・ツールキットのスピーカー+温度提示装置を備えたグローブ、そして上半身の各所にモーションキャプチャ用のマーカーをつけている。画像32(右):画像31の装着者の足下を囲むように6台のスキャナが円環状に設置されているが、上方にも同様に6台が円を描いて配置されている |
|
代理ロボットはヒトなどのサイズをした上半身型のロボットで、脚部は存在しない(画像33)。腰から下は支柱が支えているが、ヒトの上体の動作を再現するためにその支柱には複数の関節が用意されていて、上体をそらすような動きなどもちゃんと再現できるようになっている(動画5)。代理ロボットの自由度は、頭部3、上半身6、腕7×2、指15(指の本数は片手4本)×2の合計53。指が動くので、脚部は存在しないが自由度数が多いというわけだ。両手の協調動作を行う様子は動画6の通り。動画6では、装着者の動きと代理ロボットの動きが同期しているところも見られる。
| 動画 | |||||
|---|---|---|---|---|---|

|

|
||||
|
|
||||
視聴覚センサは水平が角60度のフルHD(1920×1080ドット)両画面カメラ、ステレオマイクが備えられており、両眼カメラの立体視による自然な距離感を装着者に伝えることが可能(動画7)。また代理ロボットの指には力・振動・温度を計測可能な触覚センサが備えられているので、グラビティ・グラバーなどの機能を持ったグローブを通して装着者に物を持った時の感触や温度などをフィードバックできる仕組みとなっている。また、制御しているPCの様子も撮影させてもらった(画像34・動画8)。装着者の実際の動きと代理ロボットの動きのズレなども表示される仕組みである。動きによっては、0.2秒ぐらいの遅延が発生するという。
なお今のところ12月中旬からの展示は、ただ実機が静態展示されるだけなのか、1日に何回か今回のように研究者もしくは科学コミュニケーターが実演してみせるのかは未定。詳細はもうしばらく待とう。

|

|
|
画像33(左):代理ロボットは腰関節などはあるが、脚部は存在しない。画像34(右):TELESAR Vを制御しているPCのモニタ群。左列上のモニタは、装着者のマーカーをとらえているもの。また中央列下のモニタには、装着者の動きと代理ロボットの動きとのズレを表示している |
|
| 動画 | |||||
|---|---|---|---|---|---|

|

|
||||
|
|
||||