RAPIROのそのほかの機能や特徴について
--:ちなみに、RAPIROのパーツはネジ止めですか? それともはめ込み式ですか?
石渡氏:ネジ止めですね。ホビーロボット業界御用達のネジ浅井さん(浅井製作所)のネジを使う予定です。はめ込み式も検討はしたのですが、はめたり外したりをずっとやってると、すり減ってきてバカになってしまうので、ネジ止めにすることにしました。
--:組み立てにおいてはんだ付けはないんですよね?
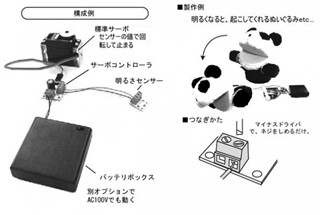
石渡氏:はんだ付けは基本的になしの方向で考えてます。ネジ止めと、コネクタに向きを間違えずにケーブルを差し込むというぐらいです。もちろん、Raspberry Piから先に何かオプションで付けたいというのであれば、それはユーザーの方が自分ではんだ付けを行っていただく必要はありますね(画像9)。

|
|
画像9。RAPIROが自分ではんだごてを持って、コントロールボードを修理しているの図 |
--:ちなみにモーションに関しては、RAPIROのイメージビデオがありますが、あそこでやっているようにすべてできるものなのでしょうか?(動画1)
石渡氏:はい。あれは全部RAPIROの実機で撮影していますので、同じ動作をさせることは可能ですし、そうした撮影用に作ったモーションの公開ももちろん考えています。ただしホビーロボットは、同じモーションデータを使って動作させても、その動作を成功させられる確率があまり高くないんですよね。工業用のように、100回行って98回とか99回は成功するというわけにはいかないんですよね。ホビーロボットは同じパーツを使っていても、組み立て方で個体差はどうしても生じますから、ユーザーの方のRAPIROのそうした個性に合わせて微調整してもらって、あとはがんばってもらえれば、同じイメージビデオを撮影することも可能かと思います。
|
動画1。RAPIROのイメージビデオ。 |
--:そういえば、電源のことをうかがっていませんでした
石渡氏:単三4本で動作します。稼働時間が2~30分ですね。ただ、リチウムポリマー電池も入れられるように設計しています。ただ、初心者向けにリチウムポリマー電池はハードルが高いので、単三電池で動くようにしています。事故とかの可能性がありますからね。
--:責任を持って扱える人には、リチウムポリマー電池を使ってもらうという感じですね。あとは、普通の家庭用電源で動かせるといいですね。そこら辺は自分で改造する形になるんでしょうけど
石渡氏:そうですね。