テクストロン・システムズが2025年10月7日に、新手の攻撃用無人機「ダモクレス」を発表した。名前でお分かりのように、同社はテクストロンの傘下企業だ。ちなみに、ヘリコプター大手のベル・ヘリコプターも、テクストロンの傘下企業である。このダモクレスが、ちょっと面白そうなので取り上げてみることにした。→連載「航空機の技術とメカニズムの裏側」のこれまでの回はこちらを参照


-

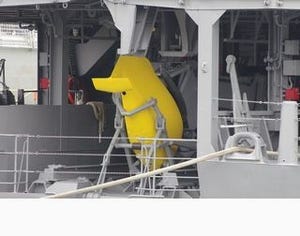
テクストロン・システムズの攻撃用無人機「ダモクレス」 写真:テクストロン・システムズ

ダモクレスの概要
名称はおそらく、ギリシア神話にある「ダモクレスの剣」にひっかけたものであろう。つまり「敵軍の頭上に吊るされた剣」という趣ではないかとの見立てだが、真相やいかに。
ダモクレスは円筒形の胴体を持ち、尾部に4本の脚が生えている。そして地上では、その脚を使って直立している。こんな形態だから、地上に立てた状態で垂直離陸させることになる。メーカー自身も、これはVTOL(Vertical Take-Off and Landing)機だといっている。よって、滑走路もカタパルトも必要ない。
胴体の中途に、推進手段となる二重反転プロペラが付いている。この、胴体の途中にプロペラを設ける配置は、第498回で取り上げたエアバスのフレックスローターと同じだ。動力源に関する言及はないが、「低騒音」をうたっているから、電動式の可能性も考えられる。
ただしフレックスローターはプロペラが1つなので、おそらくは反トルク対策として、垂直尾翼(?)を備えている。また、主翼を備えており、離着陸時以外は普通の固定翼機みたいに水平飛行する。
一方、ダモクレスは二重反転プロペラで反トルクを相殺できるからか、空力的な反トルク対策はない。尾部に生えているのはあくまで「脚」であって、「翼」ではない。そして、フレックスローターと違って主翼はない。すると、機体は “立った” 状態のままで飛行すると思われる。
二重反転プロペラの部分が少しくびれていて、その先で再び太くなる。その先端部にセンサーを組み込んでいるようだ。センサー窓らしき開口は、先端ではなく、側面に向けて付いている。
トップアタックという特徴
プレスリリースの中で、ダモクレスは、LE(Launched Effect)という呼び方をされているほか、“precision unitary munition”という言葉も使われている。このことからすると、使い捨てにしても構わない攻撃用無人機、という位置付けではないかと読める。“munition”とは弾のことだからだ。
では、その攻撃任務をどのように実現するか。
普通、片道切符の攻撃用無人機というと炸薬弾頭を内蔵しており、頭上からターゲットに向けて突っ込んで行って、命中したところでドカン。という使い方をする。だから本連載ではこれまで、「自爆突入型無人機」という言葉を使ってきた。突入して爆発したらそれっきり、の片道切符である。海外で“kamikaze drone”という言葉が使われるのも宜なるかな。
ところがダモクレスは、トップアタックをやるのだという。この言葉は通常、地上を走っている戦車などの装甲戦闘車両に対して頭上から攻撃を仕掛ける場面で用いられる。装甲板がもっとも薄いのは上面だから、そこを狙うという考え方による。
そして、炸薬弾頭ではなくEFP(Explosively Formed Penetrator)を使うと説明されている。日本語では自己鍛造弾といい、炸薬と金属製のライナーを組み合わせた構成になっている。そして、ライナーがターゲットの側に位置する。
炸薬が爆発すると、爆薬レンズによる平面爆轟波、それとミスナイ・シャルディン効果による爆轟波の集中で、金属ライナーが冷間鍛造によって変形して、弾丸状の爆発成形侵徹体を形成する。それがターゲットに突っ込んで装甲板を突き抜ける仕組み。
だから、EFPを使用するダモクレスは、ターゲットに突っ込む必要がない。水平ないしはそれに近い角度で飛行して、ターゲットの真上に達したところで炸薬を起爆させればよい。つまり、一般的な自爆突入型無人機とは、飛行プロファイルが異なる。
EFPが撃ち出す爆発成形侵徹体は金属の塊で、それ自体が爆発するわけではない。あくまで、装甲戦闘車両の装甲板をぶち抜くためのもので、面的な破壊効果は期待しがたい。
つまり、ダモクレスは戦車を持っているような相手を叩くための道具と解される。正規軍同士が交戦する、「グレート・パワー・コンペティション」への回帰を受けて構想されたという推測ができよう。
どこにEFPを組み込むか
前述したように、ダモクレスは主翼を持たないから、揚力は二重反転ローターによって生み出す必要がある。だから、機体が“立った”状態のままで飛行するのではないかという推測になる。
では、そういう飛び方をしながら眼下の敵に向けてEFPを撃ち込むには、どこにEFPを設置すればよいか。機体の姿勢を勘案すると、尾部(立った状態であれば下端ということになる)に下向きに設置するしかなさそうだ。
EFPはそれでいいとして、EFPのためにターゲットを捕捉するセンサーはどうするか。前述のように、先端部に近い機体の側面にセンサー窓らしきものが見える。すると、これを使って前下方を監視しながらターゲットを捜索して、捕捉したら距離を計算、ターゲットの頭上に達したところでEFPを起爆させる。そんな動作になるのだろうか。
対地高度と、鉛直線に対するターゲットの角度が分かれば、ターゲットまでの水平方向の距離は幾何学的に計算できる理屈だが、実際のところどうしているのか、興味がもたれるところではある。
偵察用のUAVなら、搭載するセンサーの視界を最大限に確保することだけ考えればよいが、攻撃用のUAVではセンサーと兵装の両方を考えなければならないのが難しい。
著者プロフィール
井上孝司
鉄道・航空といった各種交通機関や軍事分野で、技術分野を中心とする著述活動を展開中のテクニカルライター。
マイクロソフト株式会社を経て1999年春に独立。『戦うコンピュータ(V)3』(潮書房光人社)のように情報通信技術を切口にする展開に加えて、さまざまな分野の記事を手掛ける。マイナ4ビニュースに加えて『軍事研究』『丸』『Jwings』『航空ファン』『世界の艦船』『新幹線EX』などにも寄稿している。このほど、姉妹連載「軍事とIT」の単行本第6弾『軍用通信 (わかりやすい防衛テクノロジー)』が刊行された。