2050年までに月面に未来都市を作る——そんな壮大な目標を掲げるプロジェクト「月面探査/拠点構築のための自己再生型AIロボット」の公開実験が3月12日、神奈川県相模原市で行われた。これは国のムーンショット型研究開発事業として、2022年度に採択されたもの。公開実験では、開発した複数のロボットによる作業のデモが披露された。
-

公開実験が行われたのは、JAXA相模原キャンパス・宇宙探査実験棟の宇宙探査フィールド。ここでは、月面を模した環境で実験を行える

ロボットを月で組み立てるというアイデア
人類の次の有人宇宙開発の場として注目されているのが月面である。しかし、国際宇宙ステーションが飛行している高度400kmの低軌道に比べ、月は非常に遠い。輸送コストは高く、輸送量が限られるという、ロジスティクスの面で大きな問題を抱える。その一方で、有人拠点の構築には、多種多様な作業が必要という技術的な難しさもある。
それを解決する手段として、同プロジェクトが研究開発を進めているのがモジュラー型のAIロボットである。ここでキー技術となるのは、モジュラー型であること。通常の探査では、地上で完成させたロボットを輸送するのだが、これはモジュール単位で輸送してから、月面でロボットとして組み立てるというのが大きな違いだ。
-

モジュール単位で月面に輸送し、現地でロボットとして組み立てる
(画像提供:東北大学・吉田和哉教授)

モジュール単位であれば、完成形のロボットよりも収納効率が上がるため、限られた輸送機会を最大限に活用できる。また、モジュールの組み合わせを変えることで、月面でさまざまな形態のロボットを作れる。一度組み立てたロボットでも、構成を変えてまた別の作業に使うこともできるので、そういう面でも効率が良い。
月面にはまず、こういったロボットを輸送し、無人で拠点を構築してから宇宙飛行士が現地に行って、滞在を開始する。その後は、危険な屋外作業はロボットが担当し、宇宙飛行士は安全な室内で快適に仕事ができる。これが、同プロジェクトが描く月面探査/拠点構築のシナリオだ。
-

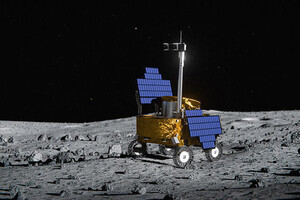
将来のイメージCG。これは月の極域を想定しており、太陽電池パネルのタワーが縦に伸びている。クレーターでは、ロボットが氷の掘削を行っている
(画像提供:東北大学・吉田和哉教授)

アームと車輪で何ができる? 「MoonBot」試作機で実験
このプロジェクトを主導するのは、東北大学大学院工学研究科 航空宇宙工学専攻の吉田和哉教授。そのほか、課題推進者(PI)として参加する研究者としては、松野文俊氏(大阪工業大学 教授)、森本淳氏(京都大学 教授)、木村真一氏(東京理科大学 教授)、山野辺夏樹氏(産業技術総合研究所 上級主任研究員)が名を連ねている。
プロジェクトではまず、ロボットを構成するモジュールとして、アームと車輪に注目した。何か作業するためには、多関節のアームは不可欠な要素。またヒューマノイドにこだわる必要はないので、移動機能としては車輪が現実的だ。吉田教授は、「この2つの要素だけで何ができるかチャレンジした」という。
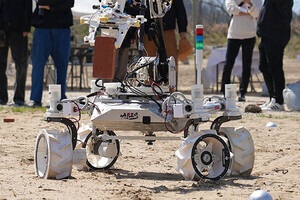
今回公開されたのは、このモジュラー型AIロボット「MoonBot」の試作機だ。車輪モジュールは、左右の両輪で構成。これにアームを1本つなげただけの最小形態でも、引きずるような形で物資の運搬は可能だ。アームの反対側に車輪を追加すれば、4輪型のローバーになるし、さらにアームをつなげれば、マニピュレータとして作業に使える。
-

「MoonBot」の試作機。アームと車輪の数を変えることで、さまざまな形になる
(画像提供:東北大学・吉田和哉教授)

モジュラー型であれば、ロボットの一部のモジュールが故障したとしても、そのモジュールだけ交換すれば、使い続けることができる。そのほか、なにか新しい作業が必要になっても、追加でモジュールを開発して、それだけ月面に送れば対応可能だ。
月面でさまざまな作業をさせるために、欠かせないのがAI技術の活用だ。まず、バーチャル空間の中でトレーニングし、賢い動きを学習。MoonBotは、アームと車輪の組み合わせでさまざまな形態になるのが大きな特徴だが、新しい形態にする場合でも、それまでの学習成果を活用できるようになっており、ゼロから学習し直す必要はないという。
-

機械学習の例。アームの関節の動きをいちいち指示しなくても、アクティブサスペンションのように動作して姿勢を保てるようになる
(画像提供:京都大学・森本淳教授)

モジュラー型ロボットに欠かせない「結合機構」の仕組み
モジュラー型のロボットを実現する上で、コア技術となるのは結合機構である。簡単かつ確実に結合・分離できるようにする必要があるし、その一方で、結合している間は簡単に外れないような強度も求められる。しかも月面という、不確実な環境でもあり、多少の誤差があっても結合できるような設計も必要だ。
同プロジェクトが開発した結合機構は、円状に並ぶ8カ所にくさび状の爪を配置。これを1個の直動型アクチュエータで引き込むことで、強固な結合を実現した。中央にはカメラとLEDを内蔵しており、結合時の位置決めに活用。結合面には電気的な端子も用意されており、結合後は通信や給電が行える。
結合機構の動作(提供:大阪工業大学・松野文俊教授)
結合機構は共通の対称構造になっており、オス/メスの区別は不要。月面では、たとえば故障によって相手側が正常に動かない可能性も想定されるが、そういった場合でも、片方の動作だけで分離や結合が可能なよう考えられているそうだ。
結合機構の根元部分には、バネのように曲がる仕組みも備わっており、5°くらいの角度誤差であれば、ここで吸収できるようになっているとのこと。なお、この部分は結合後はガッチリと固定するため、アームの作業精度に悪影響はない。
結合機構のデモ
MoonBotで有人居住モジュールを設営
月面では、資材の運搬、土木作業、大型構造物の展開・組み立てなど、さまざまな作業が想定される。今回の公開実験では、東京理科大学が開発したインフレータブル型有人居住モジュール(HIDAS)を使ったデモなどを披露。MoonBotがカメラでHIDASの展開の様子を観察し、アームで展開を支援するところを見ることができた。
-

これは太陽発電タワーの設置をイメージしたデモ。まずはソリを引っ張る

-

設置場所まで運ぶことができたら、そこでタワーを展開する

-

「HIDAS」はインフレータブルなので、大型構造物でも小さくして運べる

-

展開の支援のために移動してきたMoonBotのアームの先端部

-

MoonBotからの映像で、膨らみが不十分なセルを画像認識している

-

16セルある中で、6番目の膨らみが弱かったので、そこの展開を支援

MoonBotがHIDASの展開を支援する様子のデモ
大阪・関西万博に特別版MoonBot登場、実演も
MoonBotはまだ地上実証の段階であるが、今後、月面環境で動作するフライトモデルの開発を進め、2030年頃に月面で初期実証ミッションの実施を目指す。月面では、特にレゴリスに注意が必要となる。レゴリスが結合機構に付着すると、うまく結合できなくなる恐れがあるため、そういった対策も実装していく予定だ。
なおMoonBotは、大阪・関西万博の「フューチャーライフエクスペリエンス」にて、展示が行われる予定だ。「ロボットがつくる月面世界で、何がしたい?」というコーナーで、展示期間は8月6日(水)〜11日(月)。万博用の特別モデル「MoonBot EXPO」(仮称)による実演があるそうなので、興味がある人は足を運んでみてはどうだろうか。
-

大阪・関西万博で展示される特別モデル「MoonBot EXPO」
(画像提供:東北大学・吉田和哉教授)