大阪大学(阪大)は2月18日、外部センサやカメラを用いず、何が起こるか予測できない環境でも適用できる“昆虫サイボーグ”用の自律的なバイオハイブリッドナビゲーションアルゴリズムを2種類開発したことを発表した。
-

(A)昆虫サイボーグがスタート地点(下部黄色点)からゴール地点(上部緑円部分)まで到達する軌跡。(B)昆虫サイボーグの完成図(出所:阪大Webサイト)

同成果は、阪大大学院 工学研究科の森島圭祐教授、インドネシア・ディポネゴロ大学のMochammad Ariyanto特任助教らの国際共同研究チームによるもの。詳細は、ソフトロボティクスに関する全般を扱う学術誌「Soft Robotics」に掲載された。
障害物を回避しつつ狭隘(きょうあい)部を前進し、がれき下の生存者や特定地点を探査するレスキュー用の探査ロボットなど、可動式の小型ロボットへのニーズが高まっている。こうした小型ロボットを機械的に実現しようとする場合、目的達成に必要な計測機器に加え、周辺環境を検知するセンサ、移動用の駆動装置、そしてそれらを駆動するバッテリが不可欠となる。そのため、昆虫のような超小型サイズでの実装は、技術的に困難を伴う。
それに対し、昆虫に小さな電子制御デバイスを取り付けるだけで実現可能な“昆虫サイボーグ”は、移動や周囲の状況確認を昆虫自身の能力に依拠するため、サイズに関する課題を容易に克服できる。さらに昆虫サイボーグは、平衡感覚の維持といった基礎的な動作を素体となる昆虫が行うため、従来必要だった回路やセンサが不要となり、サイズ面だけでなく省エネルギー性にも優れるとされる。


しかし、障害物のある砂地のような複雑な環境での制御は、依然として困難だ。加えて、外部装置を用いたモーショントラッキングとその解析に依存せず、昆虫サイボーグが障害物の回避や環境変化に応じた経路再設定といった自律的なナビゲーションを行うことも、同様に困難だったとのこと。そこで研究チームは今回、性能の異なる2種類の“自律的なバイオハイブリッドナビゲーションシステム”の開発を目指したという。
自律的なバイオハイブリッドナビゲーションとは、生物が本来有する能力を応用し、外部からの指令によらず自律的に動作するナビゲーションシステムを指す。同システムでは、周囲の環境情報を収集し、その情報に基づいて進行方向を決定したり障害物を避けたりしながら、目的地までの経路を策定する。また移動や不測の事態への対処などは、素体となる生物固有の能力によって実現される。
今回開発されたアルゴリズムは、適用環境は比較的単純な状況に限られるものの、迅速な目的地到達を志向する「Reach-Avoid Navigation」と、より複雑な環境下において、素体昆虫特有の“壁面を上る”能力を活かし、目標地点への到達には時間がかかるものの、より柔軟な対応が可能な「Adaptive Reach-Avoid Navigation」の2種類だ。
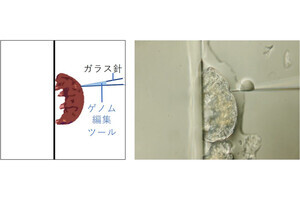
両アルゴリズムとも、目的地と現在地の座標情報をモーショントラッキングシステムから昆虫サイボーグへ送信し、搭載センサからのデータと統合して、実装デバイスのみでデータ処理を実行後に昆虫サイボーグに刺激を送るといい、この刺激に応じて「目標方向への転換」、「障害物回避」、「壁面沿いの移動」、あるいは「自由行動(刺激無印加時)」といった行動を、昆虫が本来持つ能力によって発現させるシステムである。このプロセスを反復することで、昆虫サイボーグは最終的に目的地への到達を果たすといい、従来型ロボットでは困難であった、転倒からの復帰や不整地(凹凸のある砂地など)の走破といった難題も、昆虫が生物として本来的に備える能力によって克服できたとした。
-

(A)比較的簡単な実験フィールド。(B)より複雑な実験フィールド。(C・D)それぞれの実験フィールドにおける昆虫サイボーグの目的地到達までの軌跡(出所:阪大Webサイト)

研究チームによると、今回の研究成果により、昆虫サイボーグは荒野のような不整地においても活動が可能となり、加えて搭載デバイスのみでの処理完結性から、研究室外での利用が容易となったという。これにより、人命に関わる危険を伴う発災直後の現場状況の確認、要救助者の早期発見、内部構造の把握が困難な歴史的建造物の内部調査、閉鎖空間に設置され人目が届きにくい配管設備などのインフラ点検など、多岐にわたる分野への貢献が期待されるとする。
さらに、素体として採用された昆虫は、低酸素・低栄養環境下でも活動可能であり高密度飼育にも適しているという特性から、火星表面探査をはじめとする宇宙探査ミッションの先駆的役割を担う可能性を秘めているという。加えて、このアルゴリズムは昆虫以外の生物サイボーグにも応用可能であり、深海探査などの新たな応用展開も期待されるとしている。