



京セラは11月11日、1mmの光沢反射する極小部品の距離と大きさを測定可能な小型の「AI測距カメラ」を開発したことを発表した。
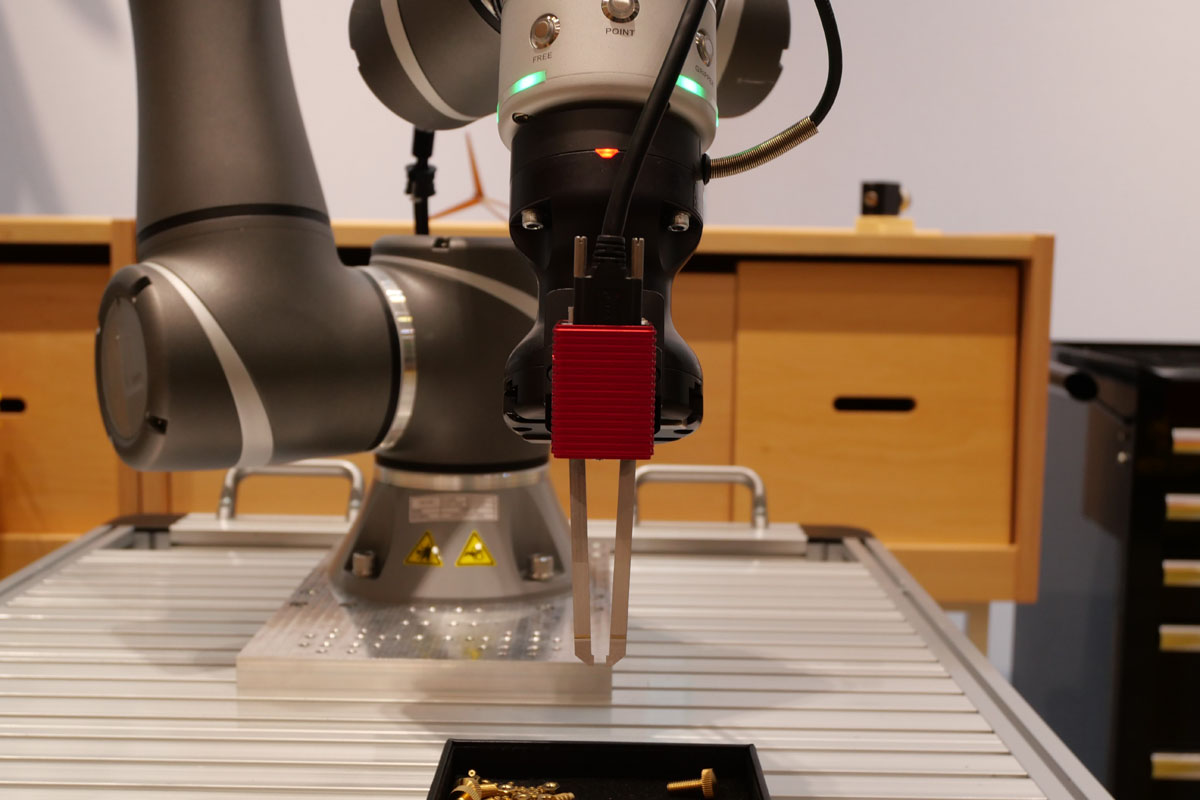
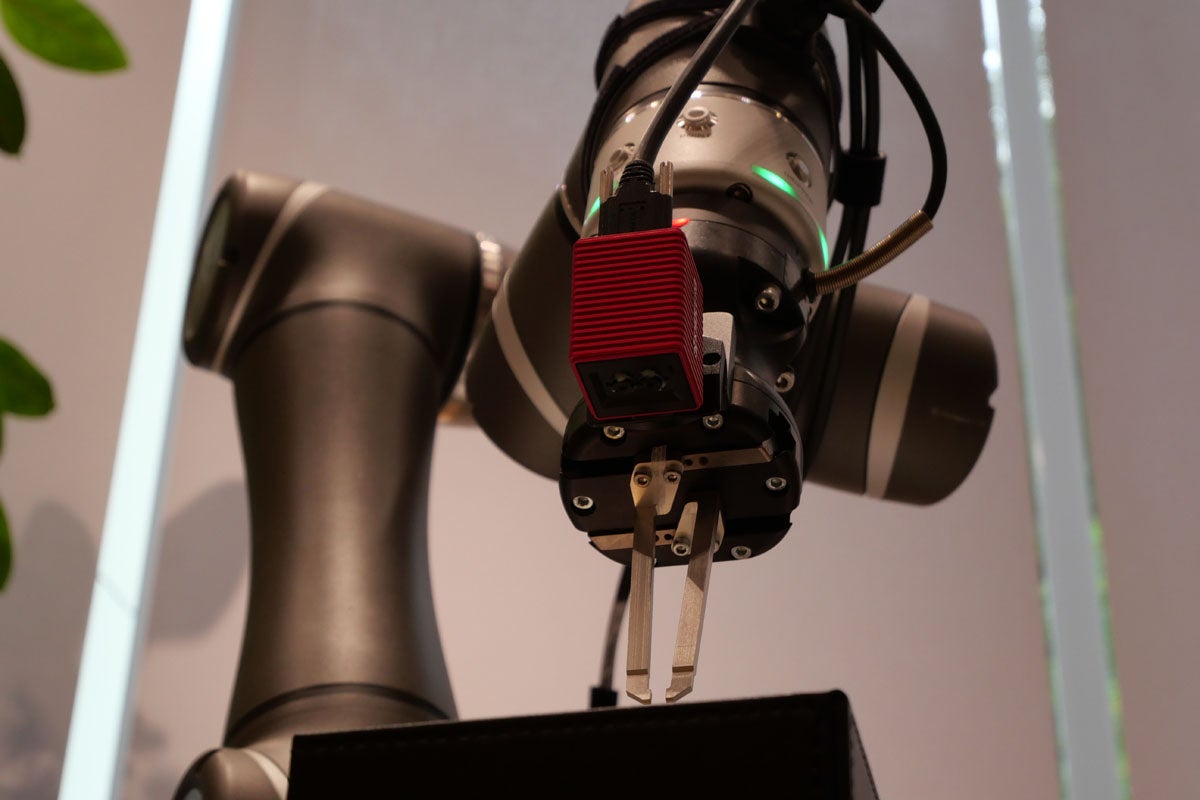
京セラ製協働ロボットと組み合わせて使われるAI測距カメラ。サイズは29mm×29mm×43mmで重さは65gと小型軽量であるが、さらなる小型化も可能な模様である。これにより、時計や眼鏡などに使われる極小のネジやナットなど、金属光沢のあるであっても認識し、正確に把持することが可能となる


現在、少子高齢化の進む日本では、労働力不足を補うためにロボットやAIの活用が期待されている。特に工場作業では、協働ロボットと人が連携した仕事をすることなども進められるようになってきているが、極小、半透明、光沢反射などの部品をロボットが認識して把持するといったことは測距カメラの精度が不足して、対応が困難とされていたという。


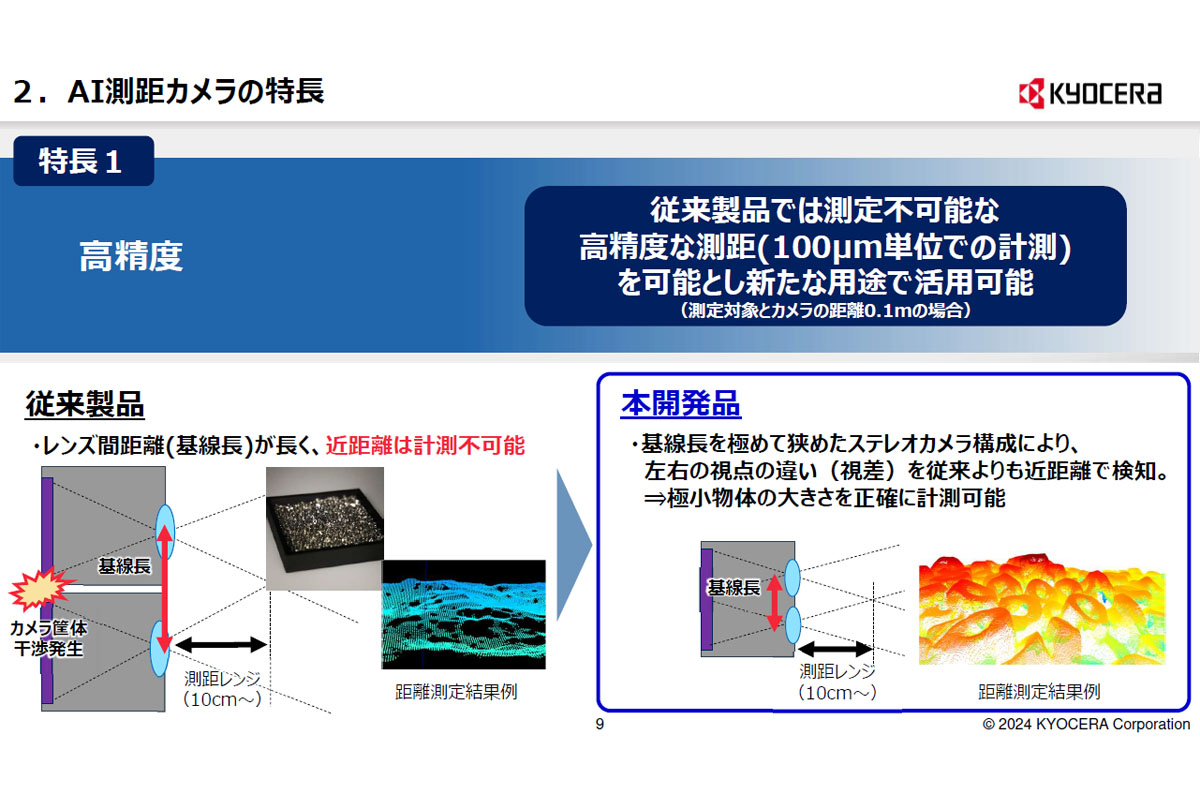
そこで同社は独自のカメラ構成技術、光学技術、AI技術などを融合することで、こうした課題を解決できるAI測距カメラの開発を進めてきたという。このAI測距カメラの最大のポイントは、従来のステレオカメラのレンズ間の距離(基線長)が長いため、近距離での正確な距離計測が難しいという点を解決したこと。具体的には1つのセンサの上に2つのレンズを搭載することで、センサには2つのレンズを通した対象物のデータが別々に入ることで、視点の違いによる視差を従来のステレオカメラよりも近い距離で検知できるようにし、さらに独自後世に対応した光学キャリブレーション技術と組み合わせることで、100μm単位での計測を可能にしたという(測定対象とカメラの距離0.1mの場合)。
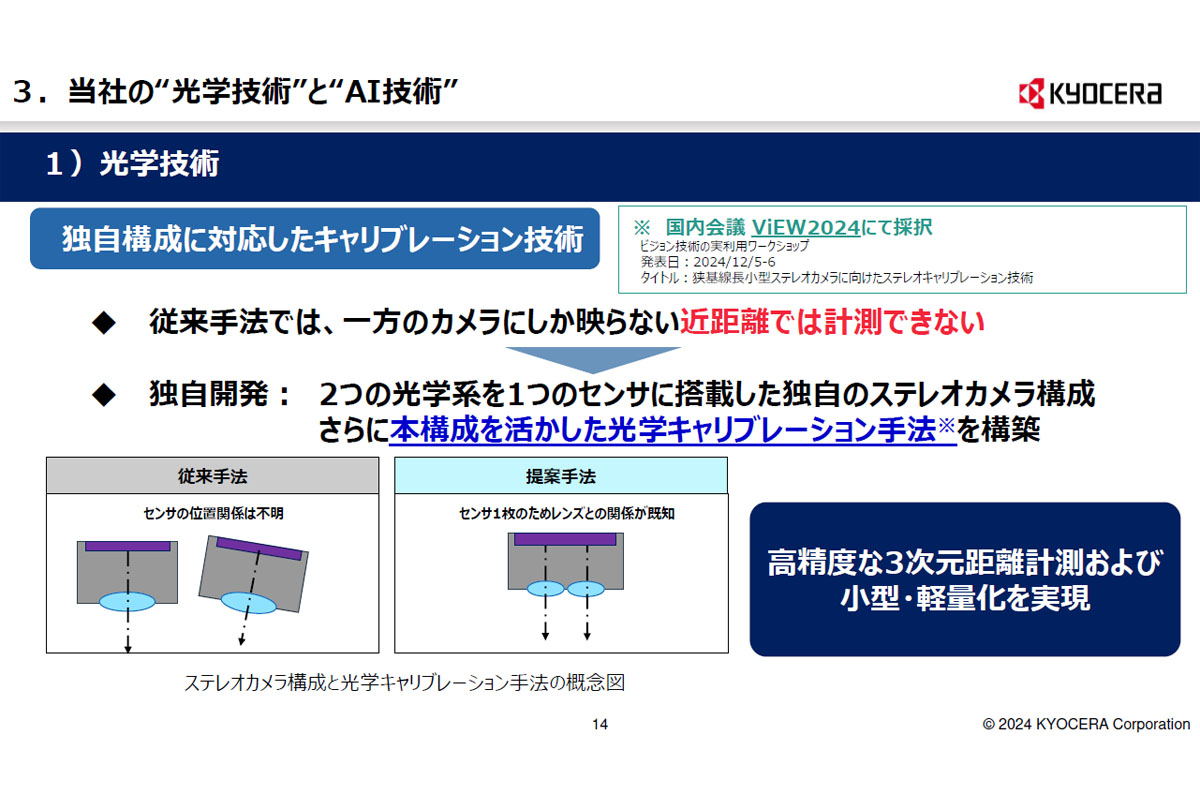
AI測距カメラ実現の最大のポイントである1センサ2レンズ技術。技術そのものはアカデミアのレベルでは存在していたが、これを商用化レベルに耐えられるものへと昇華させてキャリブレーションを可能にした点が他社に先駆けて実現できた理由だとする (資料提供:京セラ、以下すべてのスライド同様)


また、従来のステレオビジョンアルゴリズムでは、左右の画像の特徴点をマッチングしていたため、マッチングを取りにくい光沢反射や特徴点を抽出しにくいテクスチャレスの物体では原理的に計測誤差が発生してしまうため認識できなかった点を、大量学習を行ったAIベースのステレオビジョンアルゴリズムとすることで、高精度認識を実現したともするほか、この学習時間短縮のために対象物や対象環境を精密に再現するCGシミュレーション環境を構築し、学習データを自動生成することに成功。独自開発AI技術により、データ量を従来手法比で1/10かつ正解データ無しの条件で正解データありと同等の認識精度を達成したことと併せて高精度に半透明や光沢のあるモノの認識を可能にしたという。
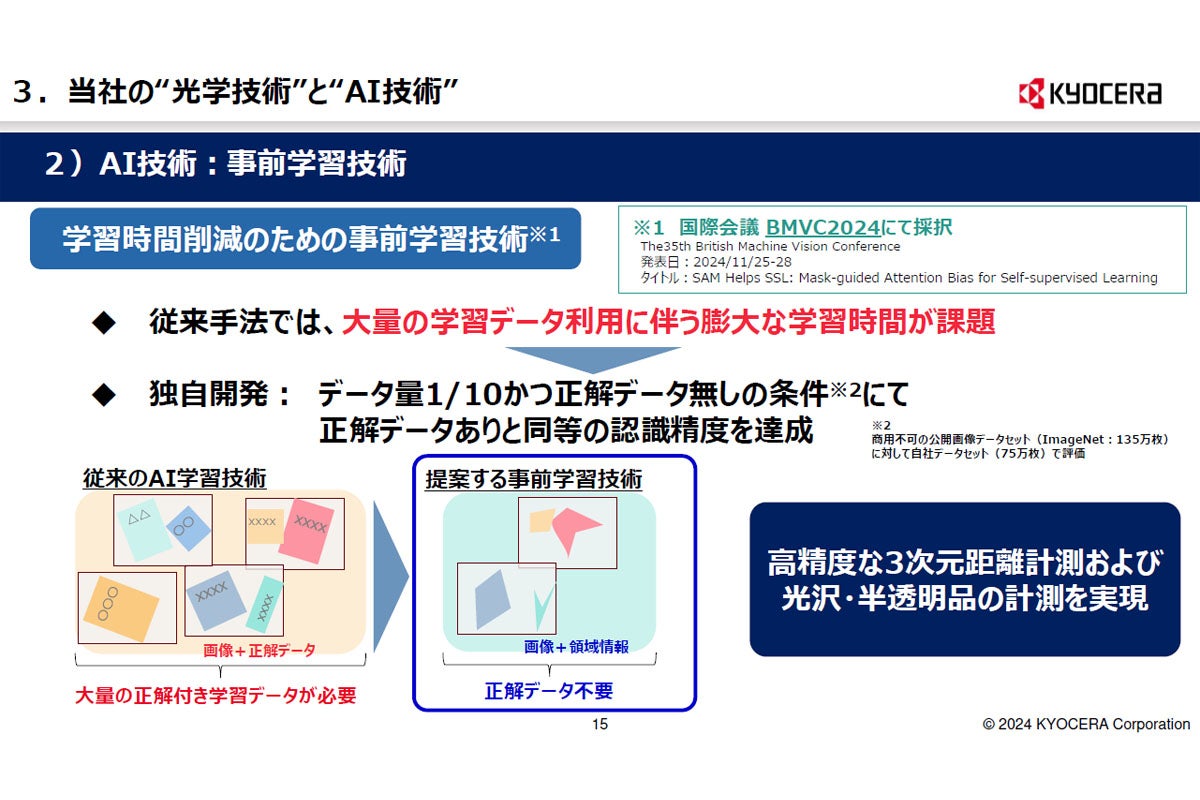
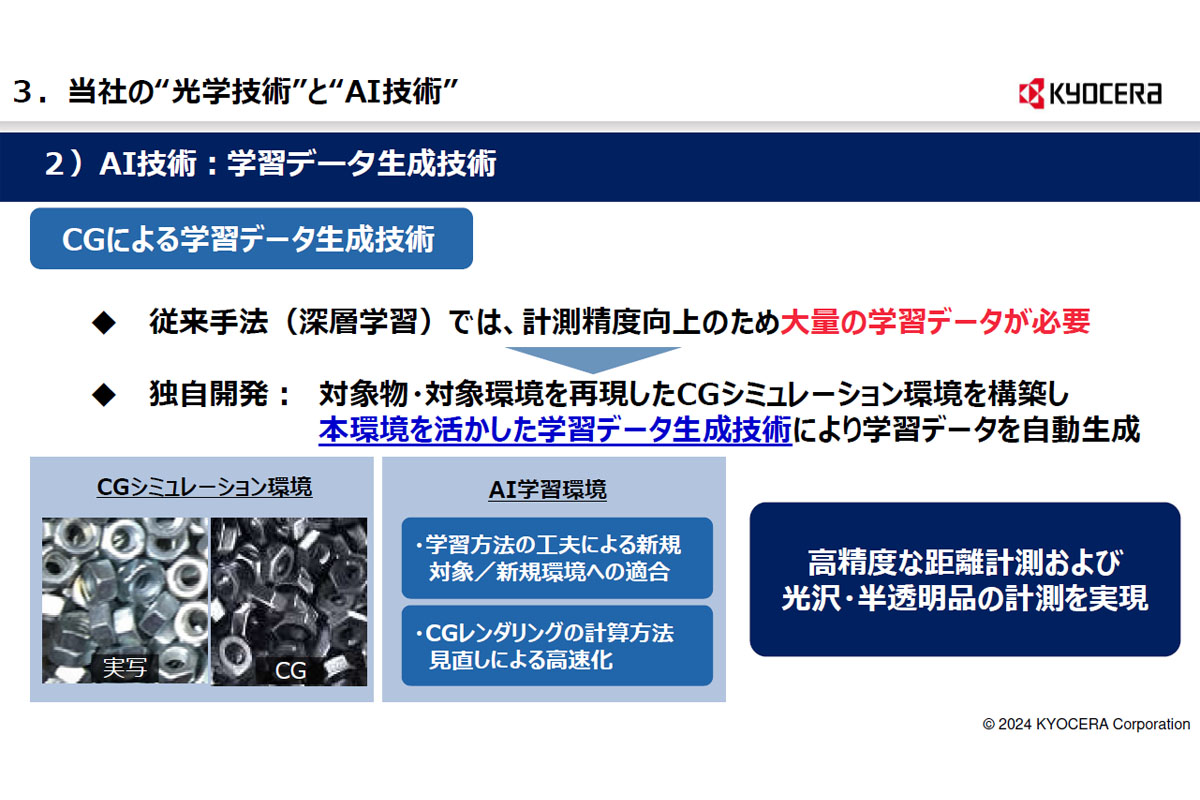
AI技術として事前学習による学習時間削減と、CGシミュレーションを活用した学習データ生成技術を組み合わせることで、高精度な距離計測ならびに光沢や半透明品の計測を実現できるだけのデータ量を確保できたとする


なお、商用化のスケジュールとしては、同社製協働ロボットと組み合わせた形での提供を想定しており、まずは2025年4月より社内向けでの導入を開始。その後、2026年より社外向けへの販売を進める計画で2028年度には協働ロボットとの組み合わせた形で150億円の売り上げを目指すとしている。
京セラのAI測距カメラによる極小ナットのピックアップデモ














