芝浦工業大学(芝浦工大)は5月22日、さまざまな「つまみ動作」を90%以上の識別率で分類することが可能な、電気インピーダンス・トモグラフィを活用した柔軟なトモグラフィ型触覚センサを活用し、ヒトの手指の微細な動きを客観的に評価するシステムを開発したことを発表した。
同成果は、芝浦工大大学院 工学研究科の朝火龍之介大学院生、東京大学大学院 新領域創成科学研究科の吉元俊輔講師(現・大阪大学大学院 工学研究科 准教授)、芝浦工大 システム理工学部 命科学科の佐藤大樹教授らの共同研究チームによるもの。詳細は、IEEEが関心を寄せるすべての分野を扱う学際的な学術誌「IEEE Access」に掲載された。
-

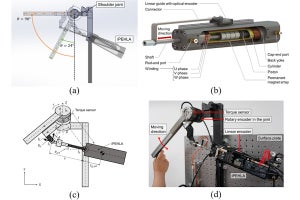
(a)センシングデバイスとコントローラとの接続イメージ。(b)2本の指(手の模型)でセンシングデバイスを水平方向からつまむ様子(出所:芝浦工大Webサイト)

手指による微細な運動スキルは、ヒトの認知において重要な役割を果たしており、日常の活動においても必須。さらに、それによってさまざまな道具が生み出されてきたことが、文明を発展させる大きな原動力にもなってきた。この手指による微細な運動スキルといえば、匠と呼ばれるような職人が思い浮かぶ。職人の有するスキルを客観的に定量化し、評価することができれば、それを次世代へと伝えることもより行いやすくなるが、職人の指先の微細な力のいれ具合などの動きを記録するのは容易ではなく、大きな課題となっていた。
現状の記録方法としては、カメラで動きを撮影し、記録映像を複数人の観察者(コーダー)が定義にしたがい分類する行動解析手法の一種である「ビデオコーディング」などがあるが、膨大な時間がかかるほか、観察者のバイアスの影響を受けやすい点が課題。また、近年ではモーションキャプチャーや手に装着する計測デバイスのような技術も活用されているが、それらも制限がある。そこで研究チームは今回、電気インピーダンス・トモグラフィに基づく柔軟なトモグラフィ型触覚センサを応用し、指の微細な動きを客観的に評価する新しいシステムの開発を試みることにしたという。
電気インピーダンス・トモグラフィとは、非侵襲的な生体断層イメージング技術の一種で、複数の電極を使用し、電圧の印加・接地条件を切り替え、電気的インピーダンス(電気的抵抗や導電率など)の変化を計測・可視化するというものである。
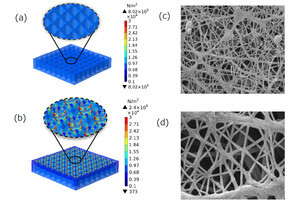
そして、2つの導電性材料が接触する際、接触圧力により電気接触抵抗が変化することから、2層の導電体の電気接触抵抗分布を複数電極の接地・計測条件を切り替えて計測し、電気接触抵抗分布を可視化する技術がトモグラフィ型触覚センサだ。この接触抵抗分布は、キャリブレーションにより圧力分布への変換を行うことができる。
今回のシステムで使用された触覚センサは、4つの層で構成される。従来の触覚センサに比べ、柔軟性、形状の汎用性、感度の点など優れている点が特徴。センサは16個の電極を備えたフレキシブルプリント回路基板と導電性材料が使用されており、さまざまな指の動きから電圧データを取得することができる。データは数値解析ソフトウェアを使って処理され、接触分布画像が再構成される仕組みだ。今回のシステムは円筒形の形状を利用しており、この機構により、つまむ動作の正確な測定が可能になったという。
そして今回の研究では、12人の実験参加者(成人)の協力を得て、指の本数と方向によって特徴付けられる6種類のつまむ動作が行われ、計測された電圧信号と再構成画像を用いて、6種類のつまむ動作が分類された。その結果、再構成画像が用いられた場合の分類精度は79.1%、電圧信号が用いられた場合の分類精度は91.4%だったとした。
今回の研究成果は、研究と実用の両面で大きな意味を持つという。この触覚センサ・開発システムを応用することで、乳幼児の細かな手指運動を促す知育玩具の開発を支援できるとした。また手の動きの自動解析は、発達医学研究における人手不足を解消し、将来的にはオンライン医療の実現に貢献できる可能性もあるとする。研究チームは今後、今回の研究を用いることでヒトの複雑な運動技能がより深く理解されるようになり、社会のために活用されることを目指していくとした。