リアルハプティクスで遠隔地のロボットの動きをリアルタイムで体感
NTTドコモと慶應義塾大学(慶大)ハプティクス研究センターは共同で、慶大が開発したロボット制御技術「リアルハプティクス」を活用し、力加減を適切に操作できる半自律型ロボットハンド・アームの無線自律制御に成功している。今回は、ドコモの最新技術の展示イベント「docomo Open House’24」にて、このリアルハプティクスや無線自律制御がどのようなものなのか実際に体験してみた。
リアルハプティクスは、人が指先や手のひらから感じ取れる手ごたえを遠隔地にあるロボット上でリアルタイムにて再現することができる技術。さらに今回開発された「無線自律制御」により、5GとMEC(Multi-access EdgeComputing)を組み合わせた力触覚情報のリアルタイム分析も可能となり、物を掴んだときの力加減(力触覚情報)から物の材質を判別し、物に適した行動をロボットが自律的に選択することができるようになった。
現在の日本においては人手不足を背景にロボットの活用が進められつつあるが、ロボットはプログラムされた動き以外はできないため、行動に機転を利かせることや、細かな対応が難しいという課題がある。このリアルハプティクスをそうしたロボットに活用することで、遠隔操作ロボットや自律型ロボットは、カメラで判断しなくても、力触覚情報から対象物の材質を判別。表面と中身の弾力感が異なるような視覚では判別が難しい物体であっても、それに応じた力加減や行動ができるようになり、ロボット活用の幅が広がることが期待されている。
ロボット制御技術「リアルハプティクス」を実際に体験
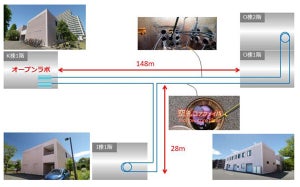
まずリアルハプティクスを体験すべく今回は遠隔にて、クロワッサン(型のクッション)とせんべいを掴むことに挑戦。2台のネットワークで連携しているロボットが離れた状態で置かれた状態で、筆者がその一方のロボットのコントローラを、遠隔操作側のロボットの動きを映し出す画面を見ながら動かしていく。
-

筆者が動かしていく方のロボット

最初の挑戦はリアルハプティクスがOFF状態で遠隔地のロボット経由でクロワッサンを掴むことであったが、この場合、実際のクロワッサンの弾力を感じ取ることが出来なかった。次に、リアルハプティクスをONにした状態でクロワッサンを掴んでみると、遠隔地のロボットが把持したクッション(クロワッサン)の強い弾力を手元でも感じることができ、クロワッサンそのものは遠隔地にあるにも関わらず、手元でクロワッサンを掴んでいるような感覚を指先で感じることができた。
-

クロワッサンを遠隔操作ロボットで掴んでいる様子

もう一方の、せんべいを掴む体験ではリアルハプティクスが動作していない状態だと、力加減がわからず優しく掴んだつもりでも勢いよくせんべいが割れてしまったが、リアルハプティクスが動作している状態だと遠隔操作であってもせんべいが割れることなく掴むことができた。
-

せんべいを遠隔操作ロボットで掴んでいる様子

-

リアルハプティクスが動作していない状態だと力の加減ができずにせんべいが勢いよく割れてしまった

自律制御システムも体験
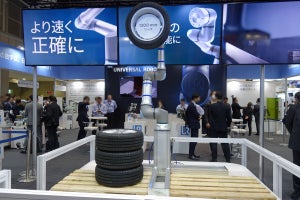
両者はすでに、モバイルデータ通信環境におけるリアルハプティクスを搭載した遠隔操作ロボットの実現性を検証済みで、今回、その最新情報としてリアルハプティクスで計測できる力触覚情報に5GとMECを組み合わせた自律制御システムを披露した。
リアルハプティクスは、カメラなどの視覚情報は使わず、物体の感触を力触覚情報から判別しており、自律制御システムを介することで、表面と中身の弾力感が異なるような視覚では判別が難しい物を、適切な力加減で持ち上げたりすることが可能となった。
今回は、大きさの違うお椀や皿を力触覚情報のみでロボットがどの大きさなのかを判別し、それぞれを指定の場所に移動させるというものを体験。最初に実際に画面を見ながらロボットを動かしていき、ロボットに指定の場所へ動かすことを教えていく作業を実施。その後、さまざまな大きさのお椀や皿を実際にロボットの前に1つずつ置いてやると、ロボットがその感触や重さを少し掴んだだけで感知して大きさを自動的に判別し、指定の場所まで持っていく様子を見ることができた。
-

皿をロボットの目の前に置いてやると、それを掴んだりして材質を判別していく

-

この場合、置かれたのは「アカシア皿」で、「小皿ではない」と判定

-

正しく皿を判別し、指定された場所に皿を動かすロボット

リアルハプティクス搭載の半自律型ロボットを活用する未来とは?
リアルハプティクスが搭載された遠隔操作ロボットと自律型ロボットが組み合わさった半自律型ロボットを活用することで、食品の陳列など力加減の判別が必要な仕事を遠隔地から出来たり、品物によって配達の仕方を変えたりといった作業もできるようになるほか、力触覚の細かなフィードバックを元にした繊細な動きもできるため救命処置や介護、プロのメイクなども遠隔地にいながらも受けられる未来が来るかもしれない。
また、5GとMECの利用により、コストを抑えたうえで機動性のあるロボットを各地で利用できるようになるほか、無線自律制御の活用でロボット本体に高性能なコンピューティングリソースを持たせる必要がなくなるため、ロボットの軽量化につながる可能性がある。さらに、リアルハプティクスの感触の強さなどは調節可能で、繊細な作業の際はより強くすることもできると担当者は語っていた。
両者は今後もさまざまな分野におけるロボット活用の社会実装を目指していく。