H-IIAロケット47号機の打ち上げが9月7日に行われ、無事成功した。このロケットは、日本初の月面着陸を目指す小型月着陸実証機「SLIM」を搭載。そして、そのSLIMの側面に格納されているのが、手のひらサイズの超小型ローバー「SORA-Q」である。成功すれば、日本初の月面走行となるはずだ。
-

射点に立つH-IIAロケット47号機。「SORA-Q」が搭載されていた

この月面に行くSORA-Qを商品化したものが、本稿で紹介する「SORA-Q Flagship Model」(宇宙分野では、実際の飛行で使われる機体を“Flight Model”と呼ぶのだが、どちらも略称が“FM”になってしまうので、それぞれ“宇宙用”と“製品版”と書き分けることにする)。タカラトミーから9月に発売されており、価格は27,500円だ。
-

タカラトミーから発売された「SORA-Q Flagship Model」の外観

ここで、「なぜタカラトミー?」と思われるかもしれないが、じつはSORA-Qは、同社が宇宙航空研究開発機構(JAXA)、ソニーグループ、同志社大学と協力して開発したもの。大きな特徴である変形機構などは、トランスフォーマーなど、同社が長年の玩具開発で培ってきたノウハウが活かされているという。
製品版のサイズは宇宙用とほぼ同じ。スマートフォンのアプリで操縦し、走行させることができる。SORA-Qは、直径約8cmの球形の状態でSLIMに格納され、月面に放出されてから展開するのだが、製品版でもそれはしっかり再現している。宇宙に行くロボットを、自宅で、同じサイズ、同じ動きで楽しめるというのは、とてもユニークだと言える。
-

SORA-Q製品版の本体重量は、実測値で179gだった。非常に軽い

まずは開封の儀
1/1スケールのロボット製品とは言っても、SORA-Qは元々が小さいため、製品パッケージも非常にコンパクトだ。球形のSORA-Qがプリントされた上蓋を開けると、格納されているSORA-Qが姿を現す。
-

製品パッケージ。左上の「JAXA LABEL」のロゴが気分を盛り上げる

-

SORA-Qは展開状態で格納されている。やや固いので慎重に取りだそう

製品には、SORA-Q本体のほか、USB充電ケーブル(タイプA-マイクロ)、ホイールカバー、ARマーカー、ステッカー、取扱説明書、月面探査公式サポーター認定証が付属する(USBチャージャーは付属しないので、別途必要)。また操縦するためには、スマートフォン(Android/iPhone)も用意しておこう。
-

セット内容

SORA-Qは、左右のホイールで駆動する仕組み。両輪を前後に回せば前進/後進し、お互いを逆向きに回せばその場で旋回することができる。戦車のラジコンなどと同じ動かし方なので、慣れている人であれば簡単に操縦できるだろう。
製品版のホイールも、宇宙用と同じくアルミ製になっていて、非常に質感が高い。ただ、床と接触して回転するところなので、どうしても傷が付きやすい。床やホイールの傷が気になるようなら、走行時には付属のホイールカバーを被せると良いだろう。
-

付属する樹脂製のホイールカバー

本体中央の上部には、カメラを搭載。スマートフォンで映像を見ながら操縦すれば、気分はまるで月面探査だ。ちなみに、宇宙用のSORA-Qには、前後にカメラが搭載されているのだが、製品版では後方カメラはダミーとなっている。
-

中央の黄色のパーツにカメラが内蔵されている

本体には、リチウムイオンバッテリを内蔵。連続使用時間は、フル充電時から約1時間程度だという。バッテリの交換はできないものの、1時間も使えるのであれば、普通に遊ぶ分には全く問題ないだろう。
-

本体前面に、充電用のUSBマイクロ端子がある

なお、外箱にも取扱説明書にも表示されているのだが、この製品版は「屋内専用」であることに注意して欲しい。宇宙用が月面を走行するため、それを再現しようと砂場で遊びたくなる気持ちはすごく分かる。すごく分かるのだが、宇宙用と製品版では防塵性に違いがあり、故障の原因となる可能性がある。土や砂の上で遊ぶのは厳禁だ。
-

やらかしやすいため、あちこちで注意されている

実際に動かしてみよう
まずは、スマートフォンにSORA-Qのアプリをインストール。アプリを起動すると、SORA-Qとの接続方法を説明する画面が表示されるので、その指示通りSORA-Q本体の電源を入れ、Wi-Fiで接続して先に進むと、オープニングムービーが流れる。ムービー中のSORA-Qが動くタイミングで実物のSORA-Qも動くという仕掛けはちょっと面白い。
ムービーが終わると、チュートリアルのミッションが開始される。指示通り、画面の左右にあるスライドバーを動かせば、前進、後進、旋回という、SORA-Qの基本的な動かし方が理解できるはずだ。ミッションはこのほかにも多数用意されているが、これはいつでもできるので、時間があるときに、ゲーム的に攻略を進めると良いだろう。
-

スマートフォンの画面。左右にあるスライダーを上下に動かして、SORA-Qを操縦する

SORA-Qで注目して欲しいのは、そのユニークな走り方だ。通常、車輪というのは中心に軸があるものなのだが、SORA-Qの軸はすこし中心からずれたところに付いている。そのため、車輪が回転するときに偏った動きになり、SORA-Qの本体も左右に傾いたり上下に動いたりするのだが、この仕組みによって、月面上での走破性能を高めているのだ。
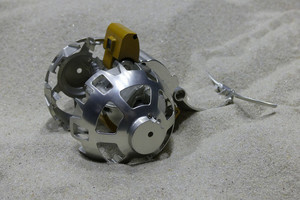
種子島での打ち上げ取材の合間に、竹崎展望台でSORA-Q製品版を走らせてみた。ちなみにこの向こうに射点があり、SORA-Qを搭載したH-IIAロケットがいる
宇宙用SORA-Qの開発で使われた「動作検証モデル」(動き方は宇宙用と同等)の走行と比べると、再現度の高さが分かる。こちらはJAXA相模原キャンパスで撮影
製品版では、もちろんこの偏心車輪の動きも忠実に再現している。ただ、このせいで、カメラの映像はかなり激しくブレることになってしまう。カメラの映像を見ながら操縦すると、月面探査の雰囲気はより楽しめるものの、酔いやすいので、心配ならSORA-Q本体を肉眼で見ながら操縦するようにした方が良いだろう。
視点が低いので、狭い部屋でも広く感じるのが面白い。ただ酔いやすいので、あまり長時間は見ない方が良いかも
なおアプリの操縦画面では、2つの表示モードを用意。カメラの映像をそのまま表示する「リアルモード」と、ARを活用した「月面モード」を、好みに応じて切り替えることができる。月面モードは下半分がCGの月面で隠され、上の方もCGの星空とブレンドされるので、割と酔いやすい体質の筆者も、このモードであれば酔いにくいと感じた。
-

こちらが「リアルモード」。カメラの映像がそのまま表示されている

-

「月面モード」に切り替えるとこうなる。月面っぽい気分が味わえる

SORA-Qでもう1つ注目したいのは変形機構である。月面ローバーは、一般的に大きい方が走破性能を高くしやすいが、ランダーの輸送スペースの都合を考えると、なるべく小さくしたい。球形でコンパクトにランダーに格納し、月面に放出後に展開するSORA-Qの変形機構は、この両立を狙ったものなのだ。
製品版の変形動作。アプリのボタンを押すと、一瞬で「球体モード」から「展開モード」へ変わる
早すぎて分かりにくいので、240fpsのハイスピード動画でも録画。ホイールが開いて、中からカメラ部や尻尾が飛び出す
製品版では、アプリからの操作で、「球体モード」から「展開モード」への自動変形が可能。その逆は自動ではできず、自分でカメラ部や尻尾を収納してからロックする必要があるものの、球体モードならコンパクトなので、カバンの中で場所を取らずに持ち運びやすいという、実用的なメリットもある。
-

「球体モード」へ変形させるための画面。ホイール位置を合わせてから、カメラ部や尻尾を畳んでロック

筆者は、種子島でのSLIMの打ち上げ取材時に、いつもこのSORA-Q製品版をカバンに入れていたのだが、旅先の風景の中でSORA-Qの写真を撮るというのは、なんだかとても楽しかった。本来の遊び方とはちょっと違う気がしないでもないが、持ち運びが簡単なSORA-Qならではの楽しみ方ではないだろうか。
-

球体モードでは、本当に単なるボールになるので、カバンにすっぽり入る。それにこの状態だと衝撃にも強そう

-

JAXA種子島宇宙センターにて。走行はせず、置いて撮影しただけなのだが、可愛らしい雰囲気の写真になる

MRで月面を走らせてみた
SLIMは現在、月に向かって順調に飛行中だ。9月7日に打ち上げられた後、しばらくは地球を周回していたが、徐々に軌道高度を上げ、10月4日に月スイングバイを実施。燃料を節約できる特殊な軌道を採用しているため、今は一旦、離れたところを飛行しているが、このあと戻ってきて12月末に再び月へ接近し、ここで周回軌道へ入る予定だ。
月面への着陸は、2024年1月~2月頃に実施する計画。SLIMは月面に着地する寸前に、SORA-Qともう1台のローバー「LEV-1」を放出する。SORA-Qは、LEV-1で中継してもらって地球と通信するため、SLIMが正常に降下し、LEV-1も正常に機能することが成功の前提条件となるが、日本初の月面着陸と月面走行を期待したいところだ。
月面着陸は難易度が高く、ispaceも1回目のミッションでは失敗している。SORA-Qによる月面走行が実現するかどうかはまだ何とも言えないものの、宇宙開発ではこういったチャレンジが何より重要である。SORA-Qの商品化は、そういう遠い宇宙でのチャレンジを、より身近に、自分ごととして感じることができるという点でも、大きな意味があると思う。
-

SORA-Q製品版は、動きも形も、非常に良く再現されている

ちょっと気が早いかもしれないが、SORA-Qが月面を走る様子を見てみたかったので、Metaから発売されたばかりの新型VRゴーグル「Quest 3」用に、月面のMRアプリを作ってみた。最後のオマケとして、これについて紹介しておきたい。
MRで自宅が月面に(畳の上なのでやや無理があるが、そこは気にしないで欲しい)
じつは筆者は最近、MRアプリの開発にハマっている。このアプリも、思いつきで半日くらいで作ったものなのだが、実際にQuest 3を装着してSORA-Qを走らせてみると、臨場感があってなかなか楽しい。そのうち筆者のWEBサイトで配布すると思うので、SORA-QとQuest 3を持っている人(いるのか?)は試していただければ幸いだ。