2023年8月に月面着陸に失敗したロシアの月探査機「ルナー25」について、国営宇宙企業ロスコスモスは10月3日、事故調査結果を発表した。
ソフトウェアの問題によって、着陸に向けた軌道変更に失敗し、墜落したと推定しているという。
ロスコスモスでは対策を施したうえで、科学成果の早期回復を目指し、2028年までに後継機を打ち上げたいとしている。
-

月面に着陸したルナー25の想像図 (C) NPO Lavochkin

ルナー25とは?
ルナー25 (Luna-25)はロシアが開発した月探査機で、月面着陸に関する技術の試験や、月のレゴリスに含まれる水(氷)の研究を目的としていた。
現在ロシアは、単独で、また中国とも共同で月探査を進める計画をもっており、将来の月面探査、とくに有人探査、月面基地の建設も見据えている。同様の計画は、米国や欧州、日本、カナダなどが「アルミテス」計画として進めており、その対抗という意味ももっている。ルナー25はその第一歩として、技術実証や国威発揚といった大きな期待がかけられていた。
また、ロシアにとって月探査は、ソ連時代の1976年の「ルナー24」以来、じつに約半世紀ぶりでもあった。さらに、ルナー25の原型となるプロジェクトは1990年代に検討が始まっており、紆余曲折を経てようやく完成した、悲願の探査機でもあった。
探査機の全長は3.17m、直径は3.70mで、打ち上げ時の質量は1750kgある。計画はロスコスモスとロシア科学アカデミー宇宙科学研究所(IKI)が主導し、開発はロシアの科学衛星開発の名門であるNPOラーヴォチキン(現在はロスコスモスの子会社)が手がけた。
探査機には各種カメラのほか、地中の氷を検出するための中性子分光装置や、レゴリスを採取するためのロボット・アーム、採取したレゴリスを分析して水を探す赤外線分光計など、約30kgの科学機器が搭載されていた。
電力は太陽電池でまかなうほか、太陽の光が当たらないうえ極寒にもなる月の夜を越えるために放射性同位体熱電気転換器(RTG)も搭載しており、運用可能な期間は1年と見積もられていた。
着陸地点は、月の南緯72.9度、東経43.2度にある「ボグスラフスキー・クレーター」が予定されていた。この場所は南極に近いため、水が氷の状態で埋蔵されている可能性があり、有人探査や月面基地の建設を目指すロシアにとって、まさにうってつけの場所でもあった。
ルナー25は日本時間2023年8月11日8時10分(モスクワ時間同日2時10分)、ロシア極東部アムール州にあるボストチヌイ宇宙基地から、ソユーズ2.1bロケットに載って離昇した。
ロケットは順調に飛行し、地球を回る軌道に乗ったあと、ロケットの最上段「フレガート」によって月へ向かう軌道に乗り移った。そして、8月16日には月を回る軌道への投入に成功した。
-

打ち上げ準備中のルナー25 (C) Roskosmos

軌道を下げるはずが墜落
ルナー25の月面着陸は8月21日に予定され、それに向けて19日にはエンジンを噴射し、軌道変更が行われた。この軌道変更では、近月点高度(月の地表に最も近づく点)が18km、遠月点高度(月から最も遠い点)が100kmの軌道に乗り移ることになっていた。
しかし、日本時間20時57分に探査機との通信が途絶えた。その後ロスコスモスは、捜索と通信復旧を図ったものの奏功せず、20日には「予備分析の結果、トラブルにより軌道から外れ、月面と衝突したとみられる」と発表した。
落下予測地点は南緯57.91度、東経61.45度と推定された。24日には米国航空宇宙局(NASA)の月探査機「ルナー・リコネサンス・オービター」が撮影した、ルナー25の落下によってできたとみられるクレーターの画像が公開されている。
ロスコスモスは事故の原因について調査を進め、そして10月3日にその結果を発表した。
それによると、主な問題はソフトウェアにあったという。ルナー25には「BIUS-L」と名付けられた、複数の光ファイバー・ジャイロスコープや加速度計が入った装置が搭載されている。BIUS-Lの測定データは、船の誘導と航法を担当する飛行制御システム「BKU」に送信され、探査機が正しい速度にあるか、正しい場所にいるかどうかを判断し、それをもとに探査機を操作する。
しかし、実際にはソフトウェアに問題があり、実行されるコマンドの優先順位が十分に明確でなく、BIUS-Lの加速度センサーの電源がオンにならなかった。その結果、BKUはBIUS-Lからのデータを受け取ることができず、予定していた速度に達してもエンジンは停止することなく噴射を続けた。計画ではエンジンは84秒間噴射することになっていたが、実際は127秒間噴射され、そして墜落に至ったとしている。
調査チームはまた、他の問題点についても指摘している。たとえば、この事故が、月周回軌道への投入時など他のエンジン噴射で発生しなかった理由についてはわかっていないという。また、BIUS-Lには冗長のため、各センサーは主系と副系で2系統搭載されているが、軌道変更中に切り替わったことがわかっており、その理由も不明だとしている。さらに、BIUS-Lがデータを提供していない場合、BKUはエンジンを止めるはずだったものの、今回のケースでは止まらなかった理由もわかっていないという。
また、事故が起こる前には、ロシアメディアやフォーラムサイトなどで、「ルナー25のソフトウェアは、リソースと時間の不足により十分にテストされていない」という情報が流れており、それが背後要因のひとつとなった可能性もある。
ロスコスモスでは最終報告書をまとめ、近く政府へ報告するとしている。
-
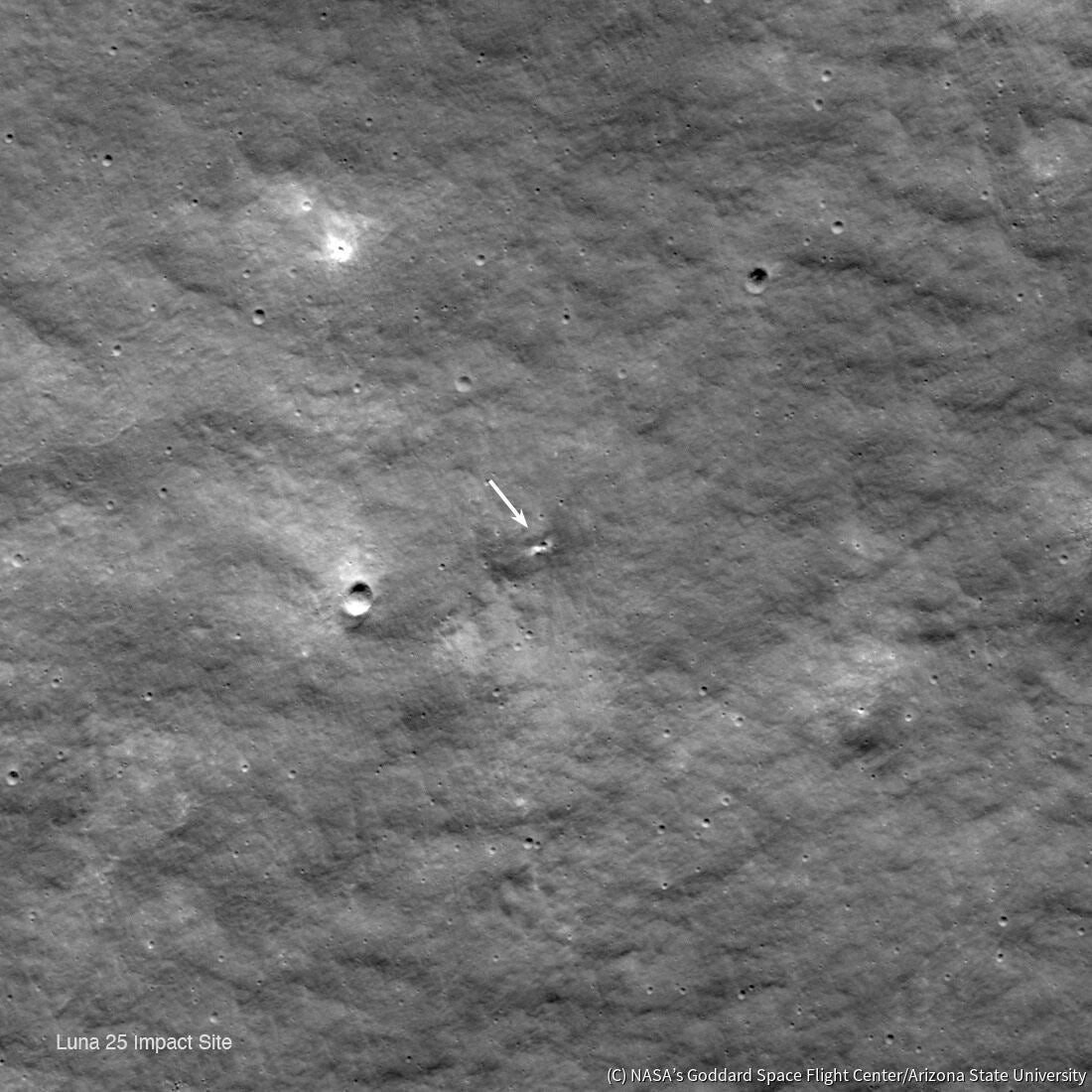
NASAの月探査機LROが撮影した、ルナー25の墜落地点。矢印のところに、ルナー25の墜落によってできたクレーターが見える (C) NASA’s Goddard Space Flight Center/Arizona State University

後継機の早期打ち上げを目指す
ロシアは現在、ルナー25に続く月探査機として、月を周回する探査機「ルナー26」と、ルナー25を改良した月着陸機「ルナー27」の開発も行っている。
これまで、ルナー26は2027年、ルナー27は2028年の打ち上げが計画されていた。ところが、ロスコスモスのユーリィ・ボリソフ社長は同日3日、「私たちは月探査計画を継続します。そして、(ルナー25の失敗を踏まえ)私たちが必要とする成果を得るために、ルナー26とルナー27の打ち上げを、できる限り前倒しする可能性を検討しています」と明らかにした。
もっとも、それが実現する可能性は低い。ロシアの宇宙開発は長年資金不足にあえぎ、人材も失われ、技術力は低下し、その影響はいまなお続いている。それはルナー25が完成までに四半世紀を要したこと、そして今回の事故が起きたことにも表れている。
さらに、ウクライナへの侵攻と西側諸国からの制裁によって、ロシアの宇宙開発をとりまく状況はさらに悪化しつつある。ルナー26とルナー27の打ち上げは、前倒しはおろか、当初の予定どおりの完成すら難しいと考えるべきであろう。
参考文献
・https://vk.com/wall-30315369_568084
・https://iki.cosmos.ru/news/gk-roskosmos-o-predvaritelnykh-rezultatakh-raboty-po-vyyasneniyu-prichin-neshtatnogo
・https://tass.ru/kosmos/18896789