東京大学(東大)は6月16日、GPSなどの衛星測位システム(GNSS)を使えない地下空間などにおけるナビゲーション技術として、岩盤をも貫く高い透過能力を持つ軽粒子のミューオンを活用した「無線muPS技術」(MuWNS)の開発に成功したことを発表した。
同成果は、東大 国際ミュオグラフィ連携研究機構の田中宏幸機構長/教授を中心とする、東大 生産技術研究所(東大 生研)、NEC、テクノランドコーポレーション、イタリア・カターニア大学、英・ダラム大学、中国・北京大学の研究者が参加した国際共同研究チームによるもの。詳細は、物理・生命科学・地球科学などの幅広い分野を扱うオープンアクセスジャーナル「iScience」に掲載された。
ミューオンは電子やニュートリノと同じレプトン(軽粒子)の仲間で、電子を第1世代とする荷電レプトンの第2世代であり、超新星爆発などの高エネルギーイベントによって加速された宇宙線が地球の大気圏内に飛び込んできて、窒素原子や酸素原子などと衝突することで生じる2次宇宙線だ。ニュートリノほどではないが、人類が建造したあらゆる建造物をほぼ光速で通り抜けてしまうほど、透過能力の高い素粒子として知られる。
ミューオンは、その高い透過能力を利用し、ピラミッド内部空間や山体中のマグマの状況などの非破壊調査に用いられており、大きな成果が報告されている。そして今回は、岩盤もキロメートル単位で貫通できることから、地下空間のナビゲーション技術(muPS)を実現するために活用されることとなった。
-
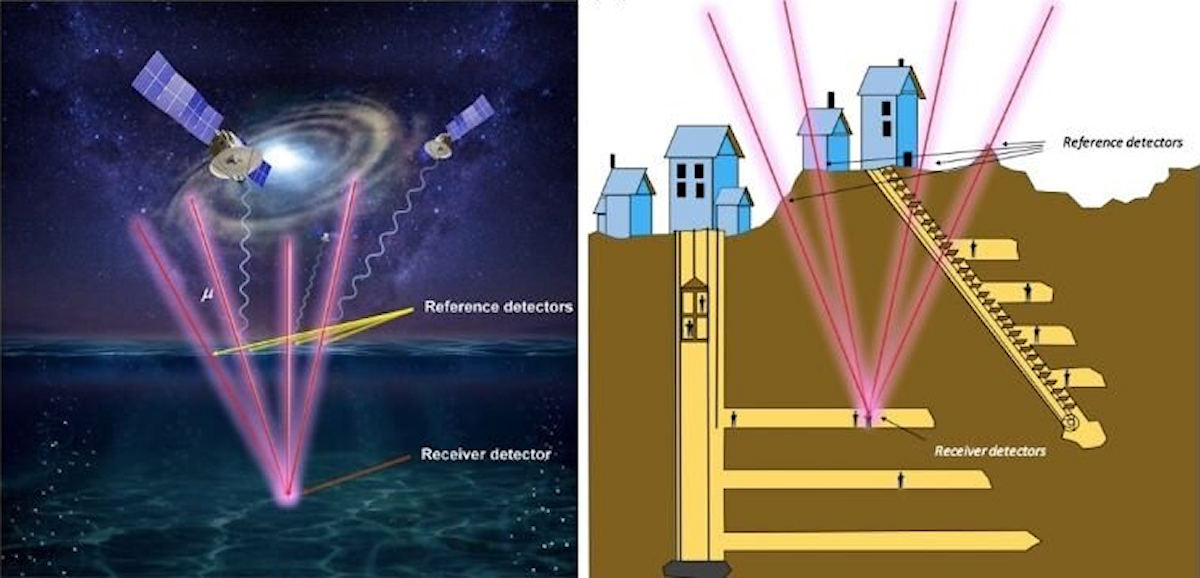
宇宙線ミュー粒子によるナビゲーション。(c)2021 Hiroyuki Tanaka/Muographix(出所:東大生研Webサイト)

ミューオンは屋内、屋外、地上、地下問わず同じ速度が担保されている。そのため送信者は、基準となる地上局と地下受信機との間のミューオンの飛行時間を測定することで、地上局と地下受信機の間の距離を正確に決定することができ、地上局を4か所以上設置することで、地下受信機の位置(x,y,z)および時間の4変数を導出することが可能だ。ミューオンは地球上のあらゆる場所に同じように降り注いでおり、グローバル規模でmuPSを実施できるのである。
-
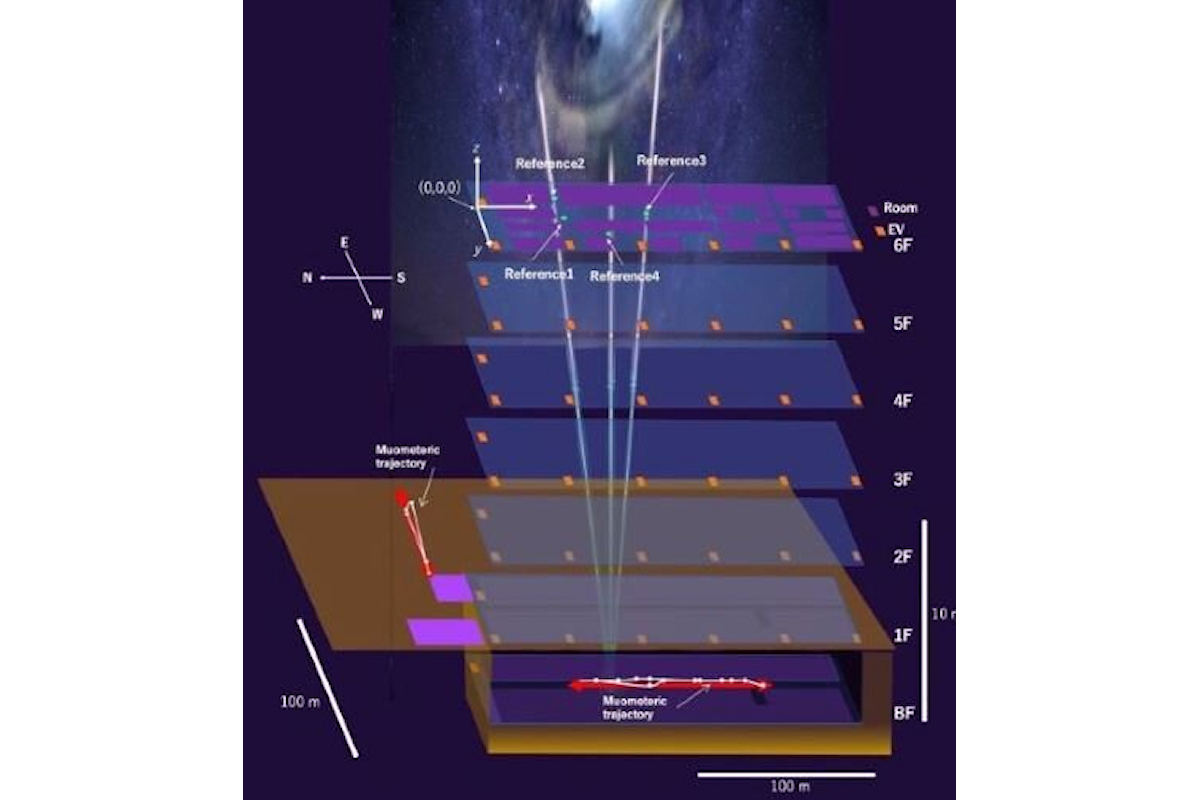
MuWNSの原理。Reference1~Reference4が4か所の地上局に対応する。BFおよび1Fにおける赤矢印が今回移動した経路。白丸がナビゲーション結果。(c)2021 Hiroyuki Tanaka/Muographix(出所:東大生研Webサイト)

これまでのmuPSでは、地上局と受信機との間をケーブルで結び、時刻同期の保証がなされていたが、ケーブルが存在することで、ナビゲーションの自由度を大きく制限することになっていたとする。今回は受信機に高精度のクロックを実装することで、地上局と受信機間の時刻同期をケーブルレスで実現したとしている。
地階におけるMuWNSのナビゲーション精度と、地表におけるGPS/GNSS単独測位精度とを比較したのが、以下の一覧だ(東京およびカナダ・カルガリーにて実施された)。数値が誤差(m単位)である。目標精度の1mには届かなかったというが、都市内におけるGPS単独測位精度と比べて高いナビゲーション精度を得ることに成功したとする。
-
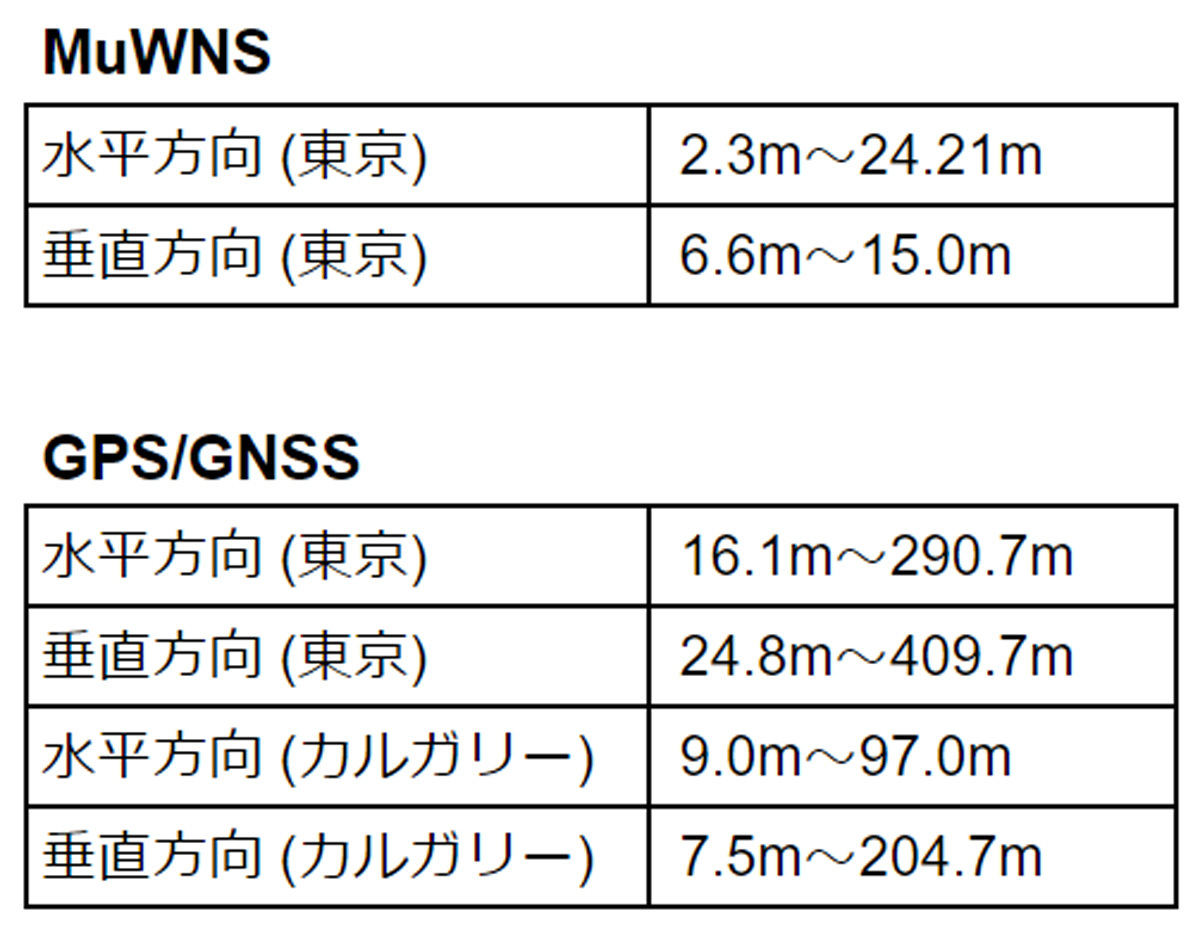
MuWNSによるナビゲーション誤差と、都内およびカルガリー市街地で測定されたGPS/GNSS測位誤差との比較。(c)2021 Hiroyuki Tanaka/Muographix

目標精度の1mを達成するためには、受信機のクロック精度を上げる必要があるという。これについては、昨今ではポスト5Gに向け、チップスケール原子時計(CSAC)の低価格化が進んでおり、現在受信機のクロックとして実装されているクオーツをCSACに置き換えることで、目標精度の達成が見込まれるとしている。
なお研究チームは、目標精度を達成できれば、自律移動ロボットへの実装が実現できるとする。MuWNSによる自律移動ロボットは、屋内、地下、海中などの環境下で、複雑な任務を効率的に遂行することが可能となるため、家庭、病院、オフィス、工場、鉱山、海洋調査、港湾などにおいて、緊急対応、セキュリティなど、さまざまなサービスの自動化を含む広範囲にわたる応用の可能性を秘めているとした。