-
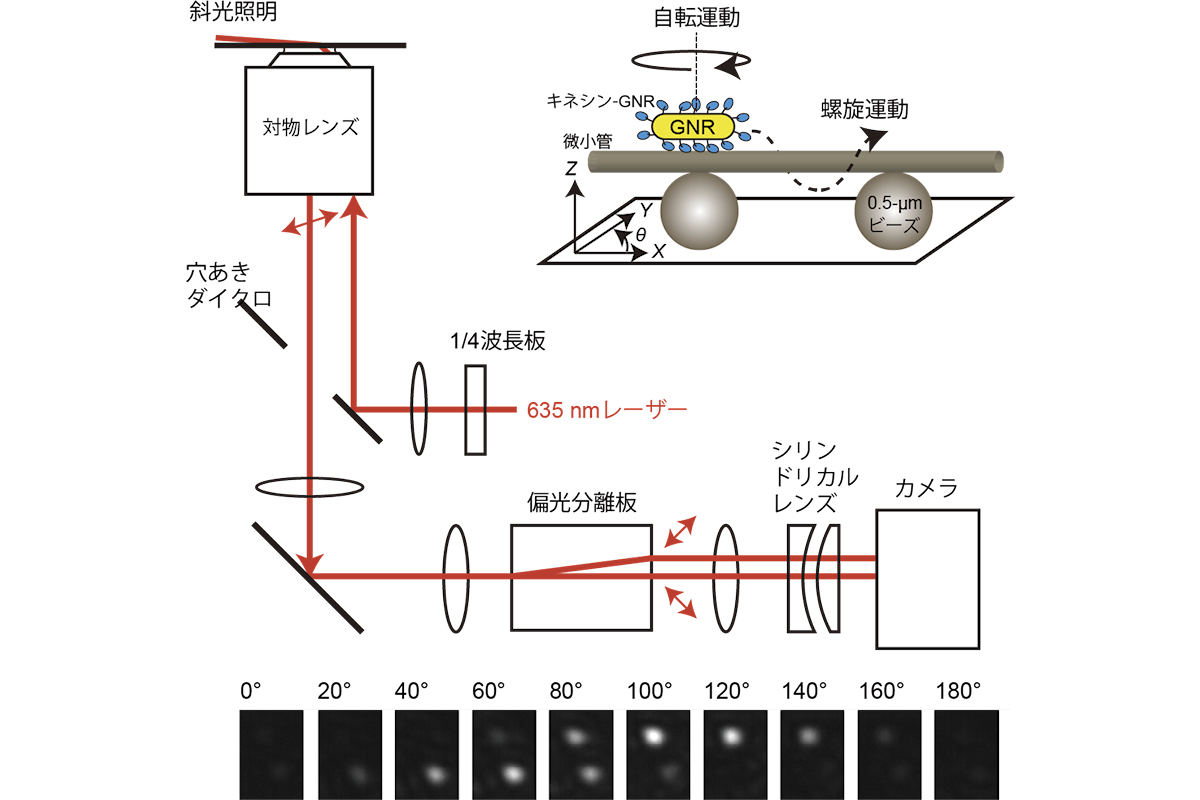
4次元単粒子トラッキング光学顕微システム。キネシン-GNRが、丸太橋状に配置された微小管表面に沿ってらせん運動をする際に、GNRの偏光計測と3次元位置計測を行える光学顕微システムだ。2つに分割した像の光強度関係から、GNRの角度(θ)を定量できる(出所:東大Webサイト)

さらに、キネシンチームによって駆動されるGNRの自転運動によって、同チームが微小管長軸に対して側方(左右方向)に進む際の歩行方向の揺らぎの偏向が強化されることが、ブラウニアンラチェット理論に基づく解析によって強く示唆されたとする。
加えて、2次元モンテカルロシミュレーションにより、キネシンチームを構成する個々のキネシン分子がトルクを発生することで、自転の回転と側方変位の周期がほぼ同期する結果が得られ、ラチェットモデルから示唆された側方歩行方向の偏向強化が、個々のモーターのトルク発生と関連していることが示唆された。
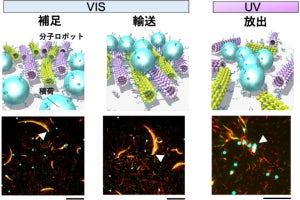
研究チームは、細胞内のような極端に混雑している環境下では、細胞内輸送物質を運搬するキネシンチームは物品を目的地点まで輸送する必要があるため、微小管表面に沿ってらせん運動をするだけではなく、自転運動をすることで微小管上の障害物を巧みに回避していると考えられるとした。
-
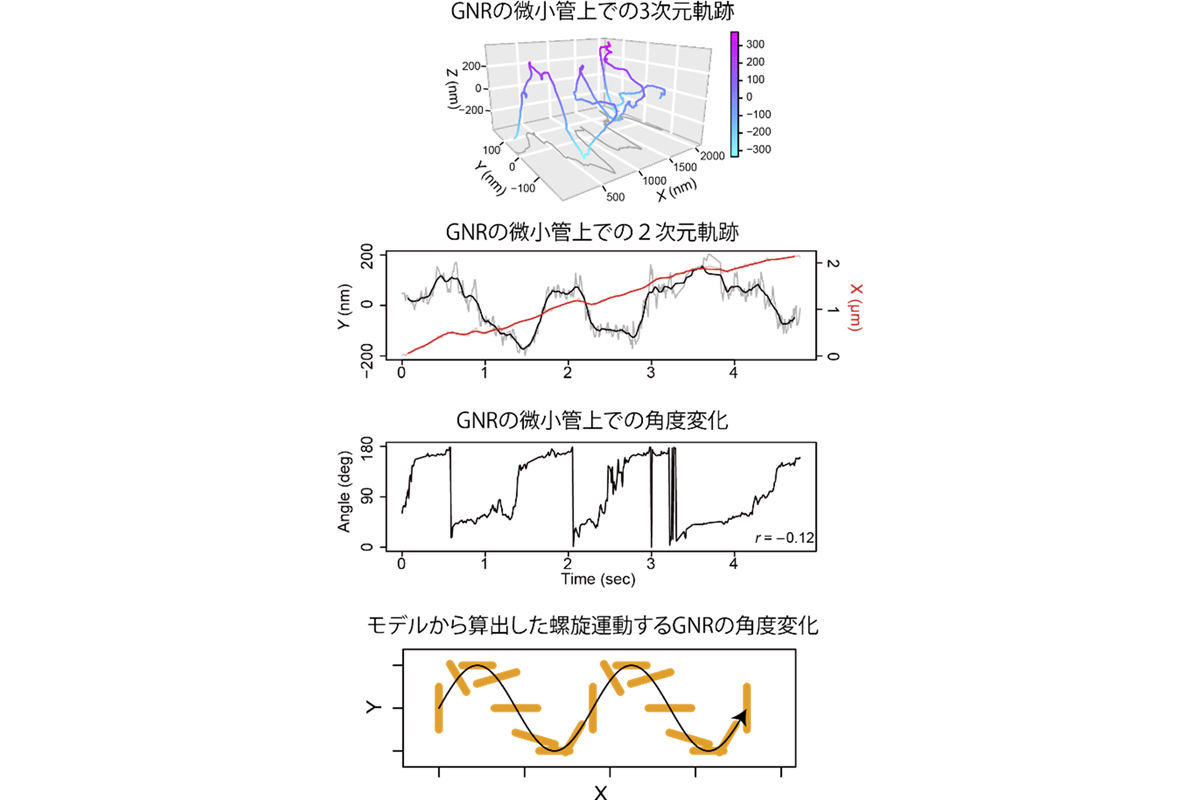
キネシン-GNRの微小管上での自転運動の計測結果と角度変化モデル(出所:東大Webサイト)

なお、個々のキネシンが上下軸周りにトルクを発生する分子機構は、いまだ解明されていない。また、キネシンチームが自転する向きは両方向あったため、個々のキネシンから出力されるトルクが自転の回転方向を決定する機構の解明にはさらなる研究が必要だという。
研究チームは、このようなバイオナノマシンともいうべきモータータンパク質に特徴的な確率的過程が含まれる運動機構を解明することによって、人工マシンとは異なるバイオミメティック(生体模倣的)な原理で動作する人工マシンの創製における新たな設計指針になることが考えられるとした。