未来のクルマのために安全で信頼性のある自動運転システムを構築することは、非常に複雑なタスクです。自動車メーカーが自律型モビリティの未来を実現するためには、差し迫って克服しなければならない課題があります。
自動運転車には何百ものセンサーが搭載され、車内や周辺にある他のスマートカーともうまく連携して走行しなければなりません。自動運転機能を可能にするソフトウェアアルゴリズムは、最終的にこれらのセンサーから集めたすべての情報を合成し、車が適切に反応することを保証する必要があります。
完全な自動運転の未来像はより鮮明になっています。交通システム全体の効率の向上と、ドライバーと同乗者の安全確保が自動運転の最も魅力的なメリットです。最近のデータでは、自動運転車の普及により、交通事故死を90%減らす可能性があることが示されています(図1)。
-

図1:NHTSAによると、交通事故の94%が人為的なミスから起きています。

自動運転のレベルアップ
現在販売されている車両の先進運転支援システム(ADAS)は、多くの交通状況でドライバーが車両を運転する必要のあるレベル2かレベル3まで達しています。多くのOEM(自動車メーカー)や業界の専門家は、レベル4または5(レベル5は、人間による操作がいっさい必要ない車両)に到達することで、より安全な交通が実現すると考えています。
-
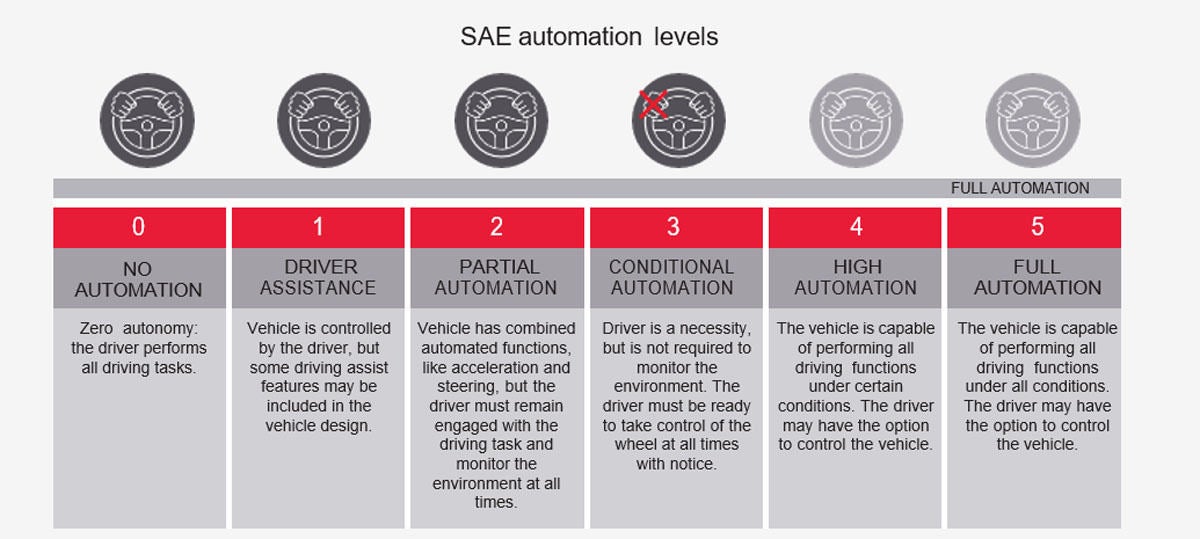
図2:SAEの自動運転レベル

ただし、自動運転を次のレベルに進めるには、多くの技術的な進歩が必要になります。レーダー、LiDAR、カメラなどセンサーテクノロジーへの大規模な投資が行われることで、持続的に周辺環境をスキャンする能力が向上します。各々のセンサーには長所と短所があるため、対象物(オブジェクト)の検出プロセスに必要な冗長性が組み込まれていることを確認し、それぞれの不得手を補完する必要があります。
また、vehicle-to-everything(V2X)通信入力を含む大量の高解像度センサーデータの結合・伝送するために、優れた演算ソフトウェアアルゴリズムへの莫大な投資も必要になります。自己学習アルゴリズムや人工知能(AI)を訓練するためのメソッドとして、機械学習(ML)が確立されています。そうしたアルゴリズムが、複雑な交通状況でも安全性を確保する意思決定を行います。ラボで再現可能かつ制御された方法で、最も現実的なスティミュラス(シミュレーション・パターン)を用いてアルゴリズムを訓練することが、正確性や安全な展開を実現するうえで非常に重要です。
路上試験とソフトウェアによるシミュレーション試験とのギャップ
現在テスト時間の多くは、センサーと制御モジュール(ECUs)のソフトウェアやソフトウェア・イン・ザ・ループ(SIL)の環境シミュレーションに費やされています。試作車や公道を走行可能な車両に、完全統合した最終システムを搭載して路上試験を行うことで、OEMは市場に投入する前に最終製品を検証できます。ラボ内でバーチャル環境を再現し、正確なシーンをレンダリング、さらに本物のレーダーセンサーと信号を使用することで、シミュレーションと路上試験とのギャップを埋めることができるのです。
現在課題となっているのは、特に複雑なシーンに多くの不確定要素が含まれる場合の完全なレーダーシーンをエミュレーションすることです。車をテストトラックや公道に持ち込む前にラボでコーナーケースを含む全ての運転シナリオを徹底的にテストすることが目的です。
一般に、ソフトウェアシミュレーションは、開発サイクルの初期段階で使用されます。基礎となるセンサー、車両運動性、気象条件のシミュレーションが可能ですが、それだけでいいのでしょうか? 単純なシミュレーションでテストされたものが、実世界でも通用すると確認するだけで十分でしょうか? ソフトウェアは、結局のところ抽象的なものしか作れませんし、不完全なものです。
実環境下での路上試験だけに頼るのもまた現実的でありません。なぜなら自動車が都市部や地方の公道を100%安全に走行できる信頼性を得るようになるまで、数千キロメートルの距離を走行しなければならないからです。AV/ADAS機能を正確にテストしたければ、関連するすべてのパラメータを制御する必要があります。
実環境下テストとシミュレーションのギャップを埋めるには、セットアップに実際のセンサーと物理センサーが必要です。自動運転車が路上でどのように動作するかを予測するには、この複雑さをテストに追加するべきでしょう。
いかなる状況でも、テクノロジーがハンドルを握る人間にとって代わる存在になり 、道路上で信頼のおける、正確で安全な意思決定を可能にすることが求められています。ソフトウェアによるシミュレーションでは、実際のセンサーの反応を完全にテストできませんし、路上でのテストには再現性がありません。
今日、特にレーダーターゲットのエミュレーションを行う場合、いくつか技術的なギャップがあります。
ターゲット数の制限と視野角
一般的なアプローチでは、シミュレートされる各ターゲットをディレイラインに結びつけます。ターゲットを追加したとしても、一度に処理されるレーダーエコーは1つだけです。またアンテナアレイがある場合、レーダーモジュールの視野角の両端のターゲットを同時にエミュレートすることができません。さらに、アンテナを移動するたびに、エコーの到着角(AoA)が変化するため、再計算を行わないとターゲットの表示に誤差が生じ、精度が落ちることになります。
4m未満の距離で対象物を作成できない
多くのテストケース(NCAP:新車アセスメントプログラムの交通弱者の保護-歩行者用AEB)では、レーダーユニットの至近距離での対象物のエミュレーションが必要です。現在市販されているターゲット・シミュレーション・ソリューションの多くが長距離用に設計されています。
対象物間の分解能の低さ
これまで、ターゲットシミュレータは1つの対象物を1つのレーダーシグネチャとして処理するのみで、シーンの細部にギャップが生じていました。
例えば、混雑した複数車線の道路では、テスト機器が正確に道路上にある物体の違いを見分けなければいけません。対象物に対して1つのエコーしかないため、アルゴリズムは自転車と街灯の違いを検知できないかもしれません。
新しいテクノロジーが必要
完全自動運転の実現に向けて、信頼性の高いADAS機能のレーダーセンサとアルゴリズムを開発するには、ラボでの完全なシーンエミュレーションが鍵となります。
-
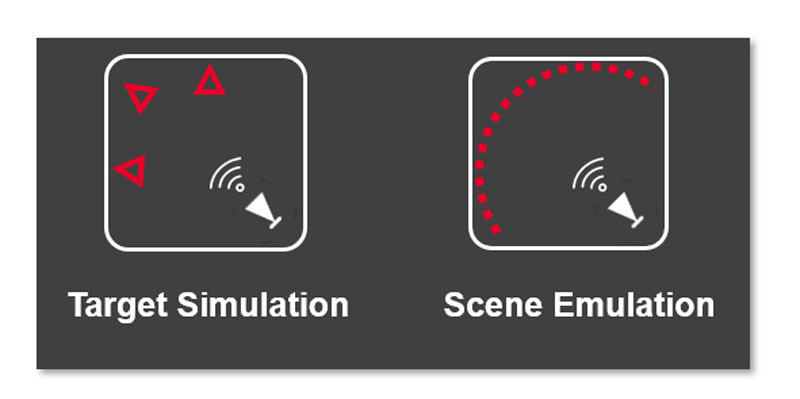
図3aと3b:ターゲットシミュレーション対シーンエミュレーション

1つの方法として挙げられるのは、ターゲットシミュレーションによる対象物検出を中心としたアプローチから、交通シーンのエミュレーションへの移行です。
これにより、高解像度の対象物が共存するような複雑なシナリオを、広い視野角と近距離でエミュレートすることができます。
テストカバレージを高め、包括的なテストシナリオを実行するためには、センサーの連続視野角(FOV)全体をカバーする必要があります。再現性のある正確なAoA検証を可能にするためには、広範囲なFOVと共に、理想的には電波暗室内で静止しているRFフロントエンドが必要になります。
現実的な交通環境を再現するには、レーダーユニットの至近距離にある対象物のエミュレーションが必要です。例えば、停止信号で車間距離が2mもないときに、オートバイが車線に入ってきたり、歩行者が突然道路を横切ったりする可能性があります。このテストに合格することが、ADAS/ADの安全機能にとって不可欠です。
また、対象物の個体識別(道路上の異なる障害物を識別する能力)も、レベル4/5の自動運転車への移行をスムーズかつ迅速にするために重要なテスト項目の1つです。 例えば、レーダー検出アルゴリズムでは、道路を走行中にガードレールと歩行者を区別する必要があります。
ADAS機能の信頼性を高める
よりたくさんのターゲット、より短い最小距離、より高い解像度、そして連続した視野角こそが実環境下テストには欠かせません。ラボでは、これによりテストカバレージが拡大し、時間の節約のみならずテストシナリオを安全に実行して繰り返すことができます。
従来のレーダーターゲットシミュレータ(RTS)では、距離と関係なく1つの反射だけを返す一方、レーダー・シーン・エミュレーターでは車両が近づくにつれて反射の数が増えていきます(これは動的解像度とも呼ばれます)。つまり、対象物の数が距離に応じて変化するのです。
ADおよびADASソフトウェアの意思決定は、テスト機器が許容する情報だけではなく、環境全体の情報に基づいて行われるべきです。キーサイトが最近発表した新たなレーダーエミュレーションテクノロジーが、複雑な運転シナリオのテストを路上からラボへと移すもう1つの方法となるでしょう。

Silviu Tuca