実際に、技術の有効性検証に向け、ロボットを用いた「ドア開け通過動作」の実験を実施。ドアを開けて通過するという動作には、外見からドアのサイズなどの認識に加え、ドアの動かし方(引く/押す)、ドアの構造(右開き/左開き)、ドアノブの位置・形状に応じた動作を検討する必要があり、ヒトの場合、過去の経験から瞬時にそれらの判断を行っているが、ロボットの場合は、これまでの方式だと、ドアの情報があらかじめない場合は、あらゆる状況に対応するためには膨大な動作学習やプログラムを記述する必要が生じてしまう。しかも、複数工程にまたがる作業をロボットが実行するためには、想定される一連動作の流れに加え、想定外の状況への対応を別にプログラムする必要もあり、その調整も大変であった。
また、想定外の状況が生じた場合、それに対応するためには、ロボットが状況の変化を認識し、作業を再計画する必要がある。それには多くの計算が必要となり、その間は動作が停止して作業時間が増加するといった問題があったという。
それに対し今回開発された技術は、多種多様な用途・条件下で適用が可能であり、たとえドアの模様やドアノブの位置、形状などが未学習であっても、ロボットが適切にドア開けて通り抜けることが可能になるという。
-

深層予測学習を用いた動作生成技術。未学習のドアの模様、ドアノブの位置や形状に対しても、ロボットが適切にドアを開け動作を実行できる (出所:早大プレスリリースPDF)

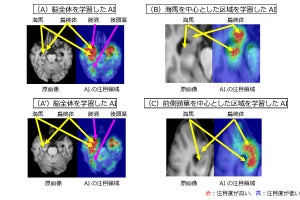
なお、今回開発された技術では、ロボットは「ドアを開ける」「通過する」といった個別動作ごとに予測モデルを記憶し、それらを組み合わせて一連の作業が実現されている。各予測モデルはセンサからの情報を用いて、近未来の状況を示す予測画像を生成し、実際のロボットの視覚画像(実画像)と比較を行い(Step1)、現実の状態にどの程度の正確性で作業が可能かを示す指標(確信度)の時間変について、リアルタイムに計算を実施(Step2)。その上で、最も確信度が高い予測モデルをロボットが自律的に選択することで(Step3)、状況に適した行動が実行されているという。
-

複数予測モデルのリアルタイム切り替え技術。1つの予測モデルでは対応しきれない複雑な作業にも対応できる (出所:早大プレスリリースPDF)

ロボットはこれらの計算をリアルタイムに行うため、動作を切り替えるタイミングや動作の流れを正確に設計する必要はなく、1つの予測モデルでは対応しきれない複雑な作業であっても、対応することが可能となったという。
今回の研究の動画「現場の状況とモデルの予測誤差を最小化する深層予測学習のロボット制御技術を用いて、自律的にドアを開け通過する機能を実証」