北陸先端科学技術大学院大学(JAIST)は11月2日、他者の失敗した行動を観察することで、その目的や意図を推定するための基礎的な情報技術を提案し、その妥当性を計算機シミュレーションで実証したと発表した。
同成果は、JAIST 先端科学技術研究科 ヒューマンライフデザイン領域の鳥居拓馬助教、同・日髙昇平准教授らの研究チームによるもの。詳細は、神経科学とニューラルネットワークなどを扱う学術誌「Neural Computation」にオンライン掲載された。
近年、人工知能(AI)の研究が加速度的に進められているが、依然として人間からの指令なしにAIが自律的に働く場面は限られている。自律的なAIを開発するのが困難な技術的理由の1つは、人間にとってはたやすく感じられる「他者の意図を読みとること」が難しいからだとされている。
その背景には、従来のAI研究では、大量の成功した行動を学習して、成功する行動を取る方法が多く採用されてきたためで、人間を自律的に助けられるようなAIを開発するには、そうした成功例に基づく学習とは異なる仕組みが求められるようになってきた。
また人間を自律的に助けるには、まず対象となる人物が困っているかどうかを判断し、もし困っているなら、次にどのようなことで困っているのかを推定する必要があるが、こうした失敗した他者の意図を推定できる能力は、認知科学においても詳細がまだ解明されていない問題となっているという。そこで今回の研究では、AI研究だけでなく、認知科学の視点も加えることで、意図推論の認知メカニズムに関する仮説を提唱することにしたという。
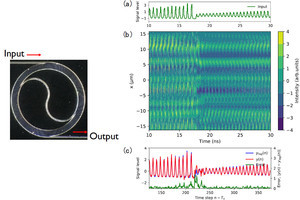
具体的には、失敗した他者の運動からその目的を推論する問題の原型として、観察した運動の軌道を手がかりにその軌道を生み出した観測できない制御システムの特性を推論するという問題への取り組みが行われた。この問題に対して、物体の運動を記述する力学系理論に基づく意図推定方法(アルゴリズム)が提案され、さらに単純なモデルの計算機シミュレーションでその有効性が実証されたという。
提案された方法では、力学系の保存量(不変量)が運動の記述子(特徴量)として用いられ、異なる制御システムの運動の同一性が定量化されたことで、成功例を学習するこれまでのAI技術では意図推定できない場合でも、行動の意図を推定できることが確かめられたという。
研究チームでは、今回の研究において実証された失敗行動の観察から意図を推定する基礎技術について、障害・困難に直面する他者を自律的に助ける“気の利く”AIの開発につながることが期待されるとするほか、将来的には、人間が同様のメカニズムで意図推論を行っているのかどうかを心理学実験的に検証することで、他者の意図を推定する人間の認知過程の解明にもつながると考えられるとしている。
-
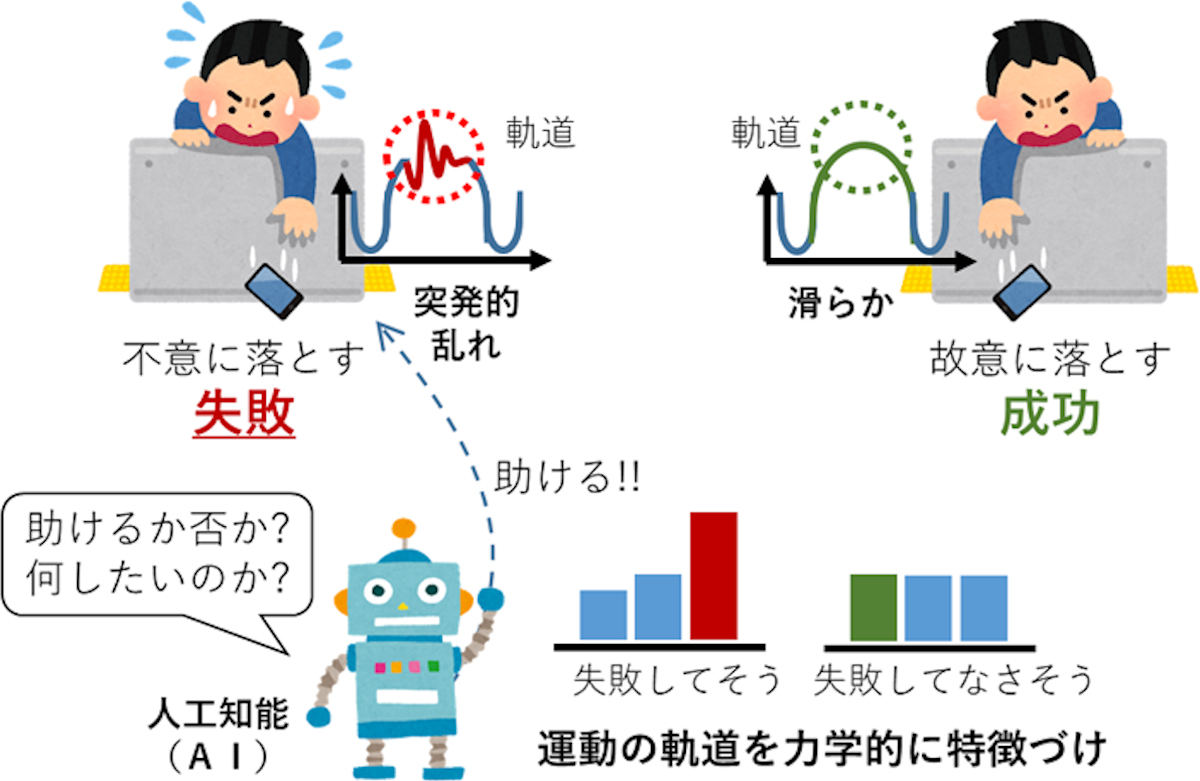
今回の研究における計算機実験の枠組み (出所:JAIST Webサイト)