



千葉大学、国際電気通信基礎技術研究所(ATR)、埼玉大学の3者は10月5日、ロボットアーム向け「2ホップ2出力無線電力伝送システム」の開発に成功したと発表した。
同成果は、千葉大大学院 工学研究院の関屋大雄教授、埼玉大の大平昌敬准教授、ATR 波動工学研究所の共同研究チームによるもの。詳細は2本の論文にまとめられ、どちらも電子情報通信学会の講演会「電子通信エネルギー技術研究会(2021年度)」にて、10月5日にオンライン発表された。
Wi-FiやBluetoothなど、電気・電子機器の無線化が進んできたが、電力の供給は未だに電源プラグや充電ケーブルなどの有線が多いが、Qiをはじめとする非接触給電技術も普及しつつあり、さまざまな分野での活用が期待されるようになってきた。
そうした技術の発展を受け、近年、1つの送電器から複数の電子機器に給電する多出力システム、中継器を使い多段(多ホップ)に電力を伝送することで伝送距離を伸ばす多ホップシステムの開発も進められるようになってきたという。
無線電力伝送における課題は、伝送遅延による性能劣化と、多出力システムの場合、その制御のために多くの情報をやり取りする必要があり、複雑性が増大してしまう点も課題となっている。
そうした中、研究チームが今回取り組むことにしたというのが、一定の電圧を出力するロボットアーム向け多ホップ多出力無線電力伝送システムの開発。ロボットの関節部において無線で電力を送れるようになれば、電力配線のねじれや摩耗による断線故障のリスクを軽減することが可能となりメリットとなる。
研究では、負荷変動に対する一定出力と高い電力伝送効率を、制御装置なしで常に実現する「負荷非依存動作」の設計論の構築が行われ、出来上がった設計論は、低周波数から高周波数まで幅広く適用可能で、高い一般性と汎用性を有しているという。
-
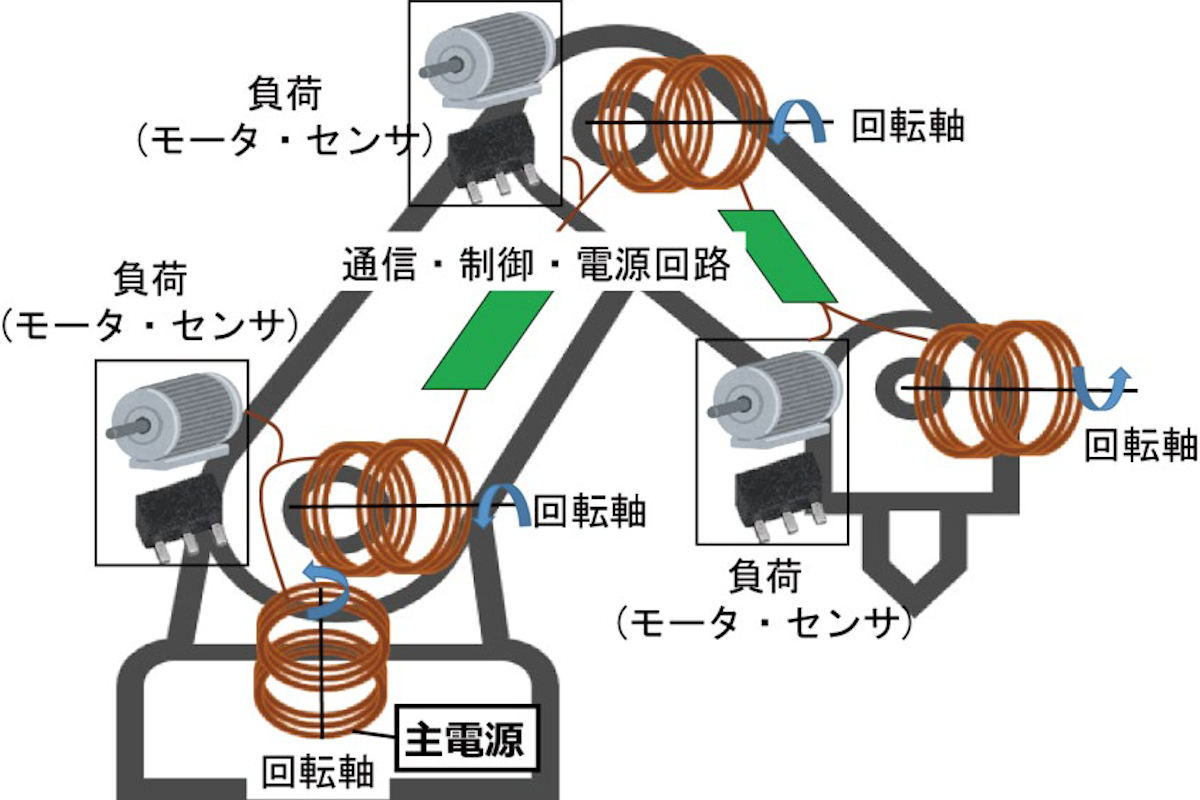
ロボットアーム向け多ホップ多出力無線電力伝送システムの概念図 (出所:共同プレスリリースPDF)

また、その設計論に基づき、具体的に2ホップ2出力の6.78MHz(ISM帯周波数の1つ)無線電力伝送システムが設計され、実験を行ったところ、ロボットのモータ、センサの動きに対して特別な制御を用いることなく、負荷変動に対し一定出力と高効率を維持できることが確認されたという。
-

実験による検証(発表論文2「多関節ロボットアームに向けた負荷非依存多出力マルチホップWPTシステム」より転載されたもの) (c) 2021 IEICE (出所:共同プレスリリースPDF)

これにより、今後、多様なアプリケーション向けに、負荷非依存動作を搭載した無線電力伝送システムを設計できるようになると研究チームでは説明しているほか、この成果は、負荷変動に対して制御システムを不要にできることを示唆しており、システム複雑化の問題を抜本的に解決できる技術となるともしている。
なお、研究チームでは今回の研究成果に対し、無線電力伝送システムにおいて、あらゆる制御を不要とする「制御レス無線電力伝送システム」の実現に向けた第一歩であると考えているとしており、今後は、ほかのアプリケーションに対してもシステムの適用を目指していくとしている。














