


災害現場に投入できる"タフ"なロボットの開発を目指してきた内閣府・革新的研究開発推進プログラム(ImPACT)のプロジェクト「タフ・ロボティクス・チャレンジ」(TRC)が最終年度を迎えている。11月2日、福島ロボットテストフィールドにて、開発成果を報告する「第7回公開フィールド評価会」が開催され、その様子がメディアに公開された。
-

今回初公開されたのは、この耐火ロボットハンド。詳しくは後述

ImPACT/TRCによる5年間の成果
ImPACT/TRCは、2014年度に開始。これまで、サイバー救助犬、索状(ヘビ型)ロボット、飛行ロボット(ドローン)、脚ロボット、建設ロボットという5分野でロボット開発を進めてきた。今回の第7回が最終のフィールド評価会となるが、プロジェクトの概要や、第4回の様子については、過去記事も参照して欲しい。
-
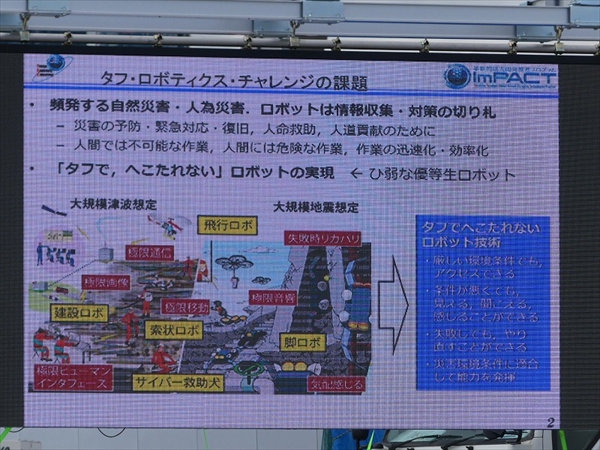
ひ弱な優等生ロボットではなく、現場で使えるタフなロボットが目標

フィールド評価会の冒頭、ImPACT/TRCでプログラム・マネージャを務める田所諭・東北大学教授は、「数多くの世界初や世界一を実現できた」とプロジェクトを総括。「実際の災害で使われ、実績を上げ始めている」とし、福島第一原発での調査(2016年)、九州北部豪雨災害(2017年)、西日本豪雨災害(2018年)で活用された事例を紹介した。
-

ImPACT/TRCプログラム・マネージャの田所諭・東北大学教授
-
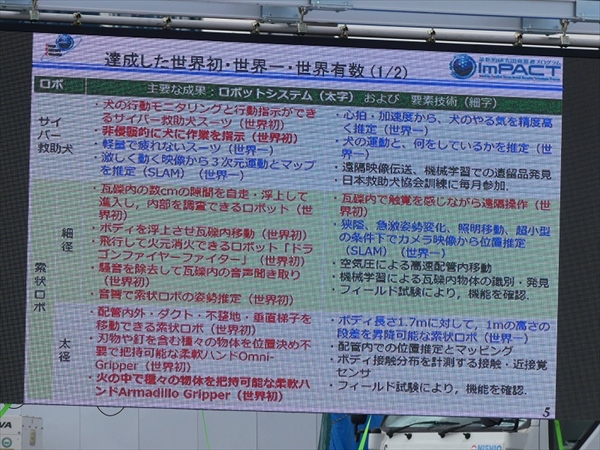
開発した成果の例。様々な世界初(赤字)や世界一(青字)がある


-
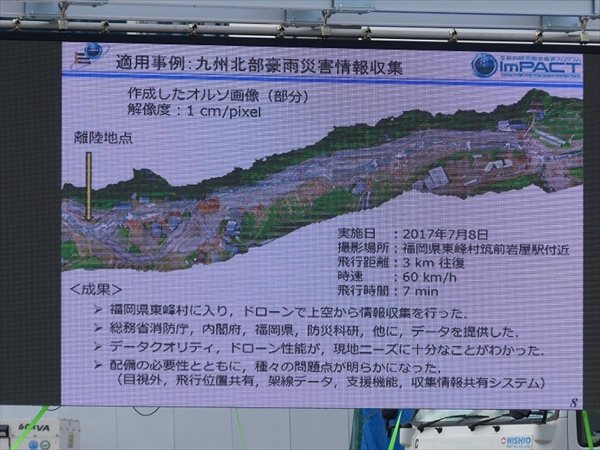
九州北部豪雨災害では、飛行ロボットが情報収集に活用された
-
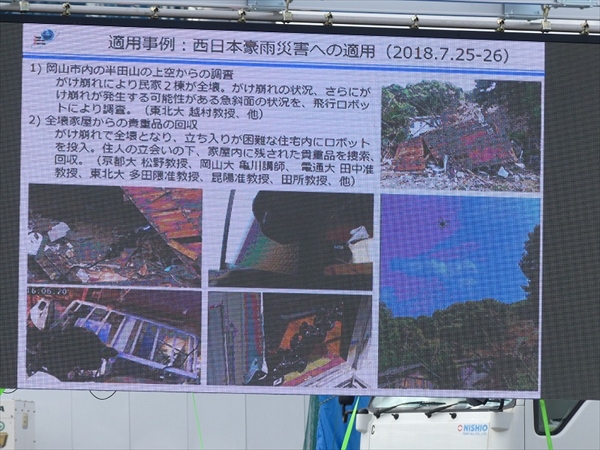
西日本豪雨災害では、全壊家屋からの貴重品の回収に成功した


田所教授はプロジェクトを始めた当初、「これだけ一流のスタッフに集まってもらったので、技術的な成果は確実に出るだろう。あとは企業・社会にどれだけ使ってもらえるかだが、これは時間もかかるしハードルが高い」と考えていたという。少しずつではあるが、現場で活用される事例が出てきたというのは、大きな前進と言えるだろう。
将来、発生が予想される南海トラフ巨大地震や首都直下地震に備えるためには、現場でロボットをたくさん使ってもらい、課題をフィードバックしていくことが必要だ。ImPACT/TRC自体は今年度で終了となり、あとは各グループが個別に活動していくそうだが、「多くの引き合いが来ている」(同)とのことで、今後の取り組みに期待したい。
なお前回から、フィールド評価会は福島ロボットテストフィールドに場を移し、開催されている。東西1km、南北500mという広大な敷地に、無人航空機、災害対応ロボット、水中探査ロボットのための開発拠点を建設するという計画で、研究開発のほか、実証実験や操縦訓練にも利用できるようになる見込みだ。
-

福島ロボットテストフィールド。まだ多くの施設が建設中だった
-

周辺に人家は無い。このあたりは東日本大震災の津波で大きな被害を受けた


地元自治体・南相馬市の門馬和夫市長は、福島ロボットテストフィールドについて「大震災を経験したこの地だからこそできること」と評価。「人の役に立つロボット・ドローンといった最先端技術を実証する場。ここから新しい可能性が生まれることを信じながら、市としてもしっかり取り組んでいく」と期待を述べた。
-

来賓として挨拶に立った門馬和夫・南相馬市長

灼熱の物体でも難なくキャッチ
今回のフィールド評価会でも、様々なロボットによるデモが行われたのだが、興味深かったのは、高い耐火性を持ったロボットハンドだ。
人間の手のように高い汎用性を持つロボットハンドの実現は、現在でもかなり難しい。しかし様々な状況が考えられる災害現場で使うには、汎用性の高さは必須だ。現場でいちいちハンドを交換していては、時間ばかりかかってしまって使い勝手が悪い。
東北大学の多田隈建二郎 准教授らのグループは、この難問に対し、「粉体が充填された袋」という、ユニークな構造を提案。物体をめり込ませた後で内部の空気を抜けばその形が固定されるので、様々な物体に対応できるという特徴があったが、高熱の物体だと溶けてしまって使えないという課題があった。
-
従来の袋状のハンド。細かい位置決めが不要というメリットがある

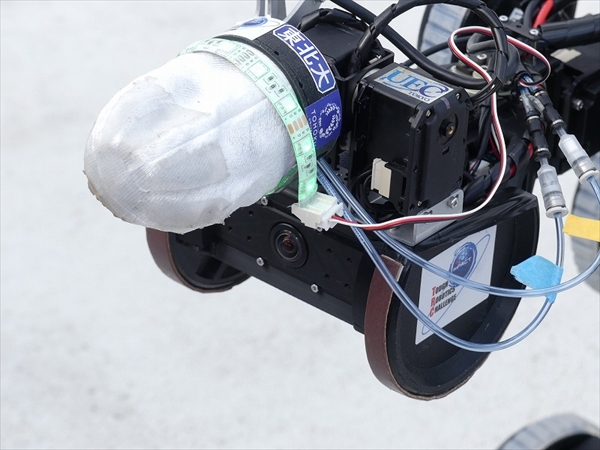
今回開発したハンドは、数珠状の金属指を8本採用。対象の物体に押し当て、形を馴染ませてからワイヤーを引くと硬化してその形が維持されるという仕組みで、先端のハンド部分にはセンサーもモーターも不要なため、高熱環境でも問題無く動作することが可能だ。尖った物体であっても、これなら袋が破ける心配もない。
-

先端のハンドはタングステンワイヤーとチタン製で耐熱性は高い
-

ワイヤーを引くと、このように指の形を物体に合わせたまま固くできる


-

放射状に指を配置。中央部は空気圧シリンダで前後に動く仕組みだ
-

このハンドの愛称は「Armadillo Gripper」となっているようだ


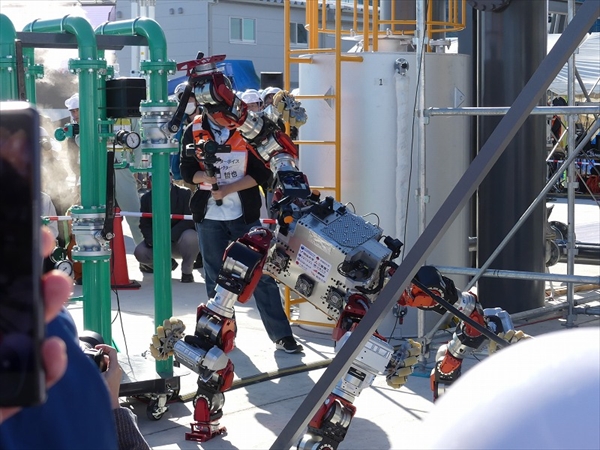
デモでは、燃えさかる炎の中から、瓦礫を除去し、その下にあったボンベを取り出すことに成功。実際の火災現場で使うには、もっとアームを長くする必要があるだろうが、構造的に大型化も小型化も容易とのことで、幅広く活用できそうだ。
「Armadillo Gripper」のデモの様子
ヘビ型ロボの実用機が世界初公開
第4回のフィールド評価会にて、空気噴射で浮上するヘビ型ロボットが紹介されていたが、今回は初めてその「実用機」が披露された。
このヘビ型ロボットは、空気噴射で頭部を浮かせることで、大きな障害物があっても乗り越えていけるのが特徴。胴体の周囲にある繊毛を振動させることで前進する力を得ており、瓦礫の中にも隙間から入っていける。
-

これは実用機ではなく従来型のデモだが、瓦礫の上を難なく進んでいける

従来の試作機は空気を噴射するのに、据え置きのコンプレッサーを使用していたが、これを空気ボンベに変更。2名だけで運用できるようになり、機動性が大幅に向上した。そのほか、先端にはカメラのほか、スピーカとマイクも搭載しており、要救助者との会話も可能となっている。
-

2名だけで運用が可能に。右側の隊員が空気ボンベを背負っている
-

空気の噴射口が見える。これで浮上し、左右のバランスも取る


連続で浮上していられるのは5分間。ただし、運用中はずっと浮上しているわけではないので、実際には10分間くらいは利用できるという。振動や制御系のための電力としてはバッテリを搭載しており、こちらは1時間以上もつとのこと。
今回のデモでは、本職の消防隊員が装着していたのだが、使ってみたところ「操作は比較的簡単だった」という。現場からの期待について聞くと、「一番難しいのは要救助者を探すことなので、そのための選択肢が増えるのは非常に有効。危険すぎて我々がどうしても行けないケースでこういうツールがあれば、かなり役立つだろう」とコメントした。
細径索状ロボットのデモの様子
頑丈でパワフルな油圧ロボットも
脚ロボット「WAREC」は、4本足を持つロボット。この4本の足は、それぞれが手にも足にもなる汎用性の高いもので、状況に応じて、4本足で歩いたり、梯子を登ったり、腹ばいで移動したり、3本足で立って1本の腕で作業したりと、様々な使い方ができる。
-
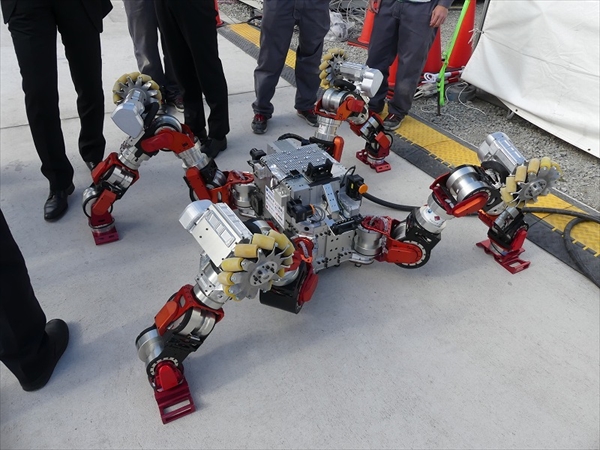
脚ロボット「WAREC」。各足は7関節+1車輪という構成になっている

従来は移動速度の遅さがネックだったが、今回は、各足にメカナムホイールを搭載。舗装された場所では車輪による高速走行が可能となっていた。デモでは、平地を移動し、瓦礫を乗り越え、40kgもあるロッカーを片手で押しのけ、ドアを開けて通り抜け、バルブを開閉する一連の動作を披露していた。
-

ドアの前に倒れていて邪魔なロッカーを、片手で排除するWAREC
-
高さ1.4mの位置にあるバルブも、3本足で立って開閉できる


また、現在のWARECは電動モーターを採用しているが、耐衝撃性を向上させるために、東京工業大学の鈴森康一教授のグループにより、油圧化の研究も進められている。今回披露された油圧WARECはまだ足部分のみだったが、電動WARECとサイズや構造が同じで、能力を比較できるようになっているという。
従来の油圧モーターは重くてロボット向きでなかったため、4種類7個の油圧モーターを新たに開発。これにより、現在の電動WARECに比べると、1.5~1.6倍のパワーを実現したという。WARECのボディに搭載可能な小型の油圧ポンプも開発しており、これ1つで4本の足を駆動することが可能となっている。
デモでは、厚さ3cmのコンクリート板を蹴り破る荒技を披露し、耐衝撃性の高さと、パワーの強さをアピールしていた。
-
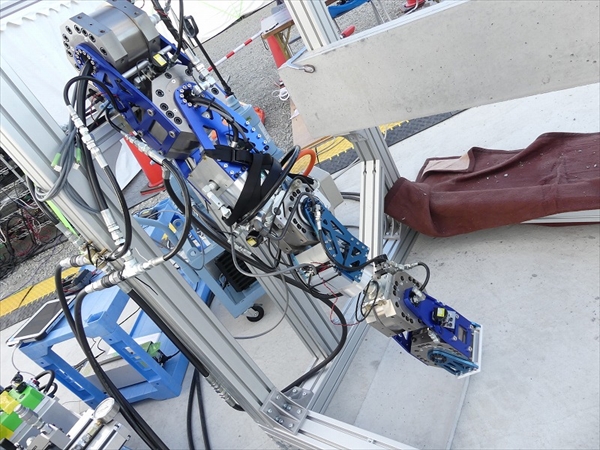
油圧WAREC。関節の構造やサイズは電動WARECと同じになっている
-

コンクリート板を蹴り壊すことに成功。油圧なので壊れる心配が無い
















