実際の災害現場でも活躍できるようなタフなロボットが必要だ――それを改めて思い知らされたのが、東日本大震災であり、続いて発生した福島第一原発の事故である。6月19日、そうしたタフなロボットの開発を目指すプロジェクトのフィールド評価会が東北大学・青葉山キャンパスにて開催、その模様がメディアに公開された。

|
|
初公開された双腕型の建設ロボット |
このプロジェクトは、内閣府・革新的研究開発推進プログラム(ImPACT)のタフ・ロボティクス・チャレンジ(TRC)。フィールド評価会は、このプロジェクトの成果を公開することを目的として定期的に実施されているもので、今回が4回目の開催となる。プロジェクトの期間は2018年度までの5年間、予算は総額35億円。
タフなロボットとは何か
「今までのロボットは、ひ弱な優等生だった」――そう語るのは、ImPACT/TRCにおいてプログラム・マネージャを務める田所諭・東北大学教授だ。

|

|
|
東北大学・大学院情報科学研究科の田所諭教授 |
ImPACT/TRCが目指すのは、タフでへこたれないロボット |
従来のロボットについて、田所教授は「条件が良いときはさまざまなことができるが、災害のような厳しい環境になると、十分にその性能を発揮することができない」と見る。ImPACT/TRCはそういった現状を変えるため、「ロボット技術を鍛え上げて、実際の災害で役に立つ基盤を作る」(同)ことを目的としている。
自然災害や人為災害の発生時、ロボットに期待される役割は、情報収集や復旧作業などである。しかし、現状のロボット技術にはまだまだ課題が多い。原発事故にはすでに何種類ものロボットが投入されているものの、苦戦を強いられている状況だ。
ImPACT/TRCが解決すべき課題として掲げるのは、「極限環境アクセシビリティ」「極限センシング」「作業失敗時リカバリ」「極限環境適合性」の4つ。つまり、厳しい環境でも移動できる、条件が悪くても周囲の状況を把握できる、失敗してもやり直せる、災害環境に適合して能力を発揮できる、ということを目指すわけだ。
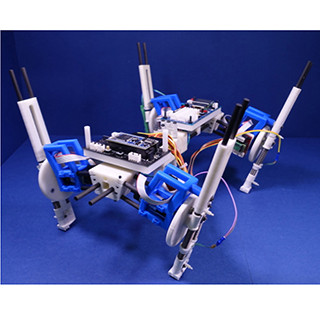
こういった課題を解決するロボットとして、具体的に開発を進めているのが、サイバー救助犬、索状(ヘビ型)ロボット、飛行ロボット(ドローン)、脚ロボット、建設ロボットである。この5種類の形態のロボットについて、今回、屋内/屋外の模擬フィールドを使ったデモが行われたので、主なものを以下で紹介したい。

|
|
原発事故の例。現状の対応(赤枠)であった課題を、TRCで解決する(緑枠) |
建設ロボット
今回、初めてお披露目されたのが、双腕タイプの建設ロボットだ。通常の建設機械は単腕であるが、双腕であることのメリットについて、田所教授は「ナイフとフォークのようなもの」と説明する。フォークだけだと食べにくいが、ナイフも使うことで、肉を切り分けるような複雑な作業も可能になる、というわけだ。

|

|
|
前回の公開時にはまだ単腕だったが、今回初めて双腕のプロトタイプが公開 |
建設ロボットの開発には、多くの大学・研究機関・メーカーが関わっている |
双腕の建設機械はすでに製品として存在するが、ImPACT/TRCで開発している重作業ロボットは、2重旋回機構を採用しているのが大きな特徴となる。この機構では、2つの油圧アームの旋回軸を同軸上に配置。それぞれ独立して360°自由に回転させることが可能で、双腕のレイアウトを変更し、さまざまな作業に対応することができる。
まだ完成して間もないため、今回のデモでは、片腕ずつの動作しか用意されていなかったが、両腕で物を持ち上げるような動作も可能だ。2つのアームを反対向きに配置して、急斜面において、片手で自重を支えながら、もう一方の手で作業するようなことも可能だという。こういった双腕を連携させた作業は、今後実現していく予定。

|
|
アームが2つあることで、さまざまな使い方が可能になる。段差を乗り越えるなど、移動能力もアップ(C:ImPACT/TRC) |
また今回、アームの先端に取り付ける4本指のハンド部も開発した。このハンドは、形状を変えることで、掘るための「バケットモード」と、掴むための「ハンドモード」を切り替えることが可能。従来のようにアタッチメントを交換する手間が不要で、これ1つで災害現場のさまざまな状況に対応できるようになる。

|

|
|
ハンドモードでは、指を2本ずつ、反対側に配置する |
バケットモードでは、指を揃えて掘削に適した形状に |
説明が後になったが、このロボットの大きな特徴は、油圧を採用しつつ、精密な作業を可能にしたことである。油圧アームは工事現場などで広く普及していることから分かるように、タフでパワーもあるが、動作特性として大きなヒステリシスや遅れがあり、精密な作業は苦手だった。
しかし災害現場では、パワフルさとともに、器用さも求められる。そこで、ImPACT/TRCでは、位置・速度の目標値制御をしつつ、油圧シリンダに加える圧力を高速に制御する手法を開発、従来に比べ、約10倍の応答速度と精度を実現したという。さらに、力覚フィードバックを導入し、オペレータは反力を感じながら操縦できるようになっている。

|
|
今回のデモでは、パイプをレンガの穴に差し込む動作を披露した |
また危険な災害現場では、人間が搭乗して動かすわけにもいかないため、遠隔操縦が前提となるが、固定視点の映像を見ながらの操縦だと、作業効率が低下するという課題があった。ImPACT/TRCでは、搭載カメラやドローンを利用した画像処理システムを開発。任意視点の俯瞰画像を提示することで、周囲の状況が把握しやすくなっている。

|
|
ドローンは有線給電のため、長時間飛行が可能。ケーブルを巻き取ることで、ピンポイントに着陸できる |
ただ、遠隔操縦となると、信頼性の高い通信システムが不可欠だ。今回のデモでは、無線の問題でうまく動かないというトラブルが発生。課題を図らずも実証する形になったが、ImPACT/TRCでは別途、タフな無線技術の開発も進められているので、そちらの成果に期待したいところだ。
この双腕ロボットにより、田所教授は「作業の能率が一桁上がるのではないか」と期待する。今後、研究開発やフィールド試験を進め、3年後には実用化したいとのことだ。
建設ロボットのデモ