新エネルギー・産業技術総合開発機構(NEDO)とゼンリンは2日、自動飛行支援システムの評価・検証を目的として、北九州市内の学校跡地において3次元地図を用いたドローン自動飛行支援システムの実証実験を、実施したことを発表した。

|
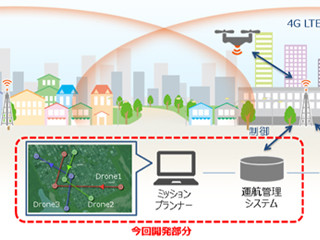
ドローン自動飛行支援システムの全体像(出所:NEDOニュースリリース) |
NEDOは、IoT社会の実現に関連する周辺技術や技術課題の研究開発を推進しており、その一環としてゼンリンは、自律飛行による山間部や離島への物資の配送、災害時の対応など、社会課題の解決に活用が期待されるドローンを安全安心に運航させるための自動飛行支援システムを開発している。
同システムは、「安全な飛行経路を示す3次元地図データ」、「移動体通信網を用いたドローンの制御プログラム」、「ドローンの状態をリアルタイムで把握する飛行履歴の解析技術」で構成される。
そして6月2日、北九州市立風師中学校の跡地において、同システムの評価・検証のため、3次元地図を用いたドローン自動飛行支援に関する実証実験を行った。
実際の都市を模擬した環境として、校舎、樹木やフェンスなどを活用し、目的地までの安全なルートの飛行、障害物を考慮した適宜最適なルートの選択、バッテリー切れなどトラブル発生を想定した安全な場所への着陸──という、3つのケースを想定した飛行実験を実施したということだ。
なお、今後はこの実験で得られた知見をもとにシステムの改良を続け、2020年代頃からの実現目標が設定されている飛行レベル4「都市部等の有人地帯での目視外飛行」の早期実現を目指すとしている。

|
ドローン用3次元地図と飛行実験のルートイメージ(出所:NEDOニュースリリース) |