Skyline Fleetの実車を用いて、自動運転のデモを実施
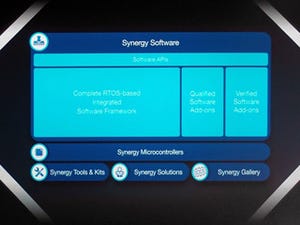
基調講演のレポートでも紹介したとおり、Renesas DevCon 2015では自動車に関してはADASがメインテーマだった訳だが、とりあえずこれは後回しにして、まずは「それ以外のもの」を簡単にご紹介したい。展示会場の出展比率で言えば、Synergyと自動車、そしてそれ以外が3:3:3程度の比率であったと思うのだが、自動車向けの展示は場所を取る(後で述べるSkyline Fleetの実車まで展示されていた)事もあってか、展示面積の半分ほどが自動車関連という感じがする様相であった。もっとも、日本で開催されたRenesas DevCon 2014ではパワートレイン関連やEV/HV関連がかなり大きく取り上げられていた気がするのだが、今回は展示はあるもののそれほど目立つ感じではなく、むしろインフォテインメントのトータルソリューション(Photo01、02)や、日本でも9月に発表された「R-Car T2」によるEthernet AVB(eAVB)のデモ(Photo03)などが人気を集めていた。

|

|

|
|
Photo01:日本だとコレであったものが、ふた周りほどコンパクトになった感じ |
Photo02:運転席周りをある種のグラスコックピット化してみるというデモ。インフォテインメントにカメラ映像などを統合した形だ |
Photo03:9月の発表の際に「これをそのままアメリカにもっていく」と聞いていたが、本当にあった |
面白いところでは、ラジコン自動車を使ったカーセキュリティのデモ(Photo04)が、ジープのハッキングのニュースが報じられて以降、関心が高いこともあってか、かなり人気が高かった。こうした傾向を受けてか、パートナーもADASあるいはグラスコックピット(Glass Cockpit)、あるいはこれらを構築するためのOSやミドルウェアに関する展示が相対的に多かったように感じられた(Photo05)。

|

|
|
Photo04:ラジコンでスロットルを観客が操作できるのだが、説明者の持つジャマーでこれが妨害されたり乗っ取られたりする。ところがラジコンの側のセキュリティをONにするとジャマーで乗っ取りが不可能になるという、単純ながら判りやすいデモ |
Photo05:これはVisteonのSmartCore Cockpit Domain Controllerのデモ。同種のものは他にもいくつか見かけた |
さて、こうした展示の中でもひときわ目立っていたのがHarbrick TechnologiesのPolySyncをベースにした、ルネサスの「Skyline Fleet」である(Photo06)。

|
|
Photo06:参加していたルネサス エレクトロニクス(日本法人)の方に「何故こんな名前に?」と尋ねたところ、「いや私もこっちに来て初めて知ってびっくりしました」。日産は米国では「Infinity」のブランド名で販売していたはずなのだが、不思議である |
さて、このSkyline Fleet、というかHarbrick TechnologiesのPolySyncのベースになったのは、「2004 DARPA Grand Challenge」である。212kmのオフロードコースを自動運転車で踏破するというこのレース、全43チームのうち完走したのは23チームであったが、この中で12位につけたのがTeam Mojavaton(現:Team Grit Robotics)である。このチームはその後、2007年にもDARPA Urban Challengeにも参加、準決勝の36チームには選ばれたものの、残念ながら決勝への出場は叶わなかった。この2つのチャレンジへの出場で得た知見を元に2012年に創業したのがHarbrick Technologiesであり、ここで利用される自動運転向けのプラットフォームがPolySyncである。
会場には2007年のDARPA Urban Challengeに参加した「White Knight」(Photo07~Photo10)も展示されていたが、とにかくセンサと機材のオバケである。2007年当時に自動運転をさせようとすると、ここまで大掛かりな機材が必要だったということだ。

|

|
|
Photo07:前面は恐らくウィンチ用の架台にLiDARが、その右にレーダーが装備され、さらにルーフの上にはステレオカメラほか、いくつかのセンサが並ぶ。ベース車両はNissan Xterraだそうだ |
Photo08:側面は相対的にセンサ類が少ないが、それでもアンテナやら何やらが結構ルーフの上にあるのが判る |

|

|
|
Photo09:リアの機材。なんでもXeonベースのサーバが数台格納されているとのこと。当時だと処理性能が足りなかったので、このような巨大な機材が必要だったらしい。写真右下にもLiDARが設置されているのがわかる |
Photo10:自動運転には直接関係ないが、フロントガラスのすぐそばに緊急停止ボタンが設置されている(ちなみに車の両側に用意されていた)のがちょっと面白かった |
これが2014年になるともう少しスマートになった。Photo11~13は、同社と韓国KIAが共同で開発した、PolySync 1.0のテストプラットフォームである。これは2014年にデトロイトで開催された「2014 ITS World Congress」で披露されたものだが、センサ類はともかく、自動運転の制御を行うほうの機材は大分スマートになった。

|

|

|
|
Photo11:フロントバンパーに付けられたレーダーとLiDARが凄い。さらにルーフにもLiDARが装備されている。カメラは車内に設置 |
Photo12:処理はノートPCで可能になった、としているがノートPCだけでは足りなかったようで、色々拡張されているのが判る。写真の上の方を見ると、車内に設置されたステレオカメラの様子も判る |
Photo13:荷物室にもECUが2つほど設置されていた(手前の黒い箱) |