筑波大学と東京工業大学(東工大)は6月19日、東工大が開発したヒトの腕を模した水泳ロボットを用いて流体力・圧力分布計測、流れの可視化を同時に実施して水泳におけるヒトの推進メカニズムを多角的に解明、高い推進力を発揮するには昆虫の飛翔などと同様に渦の発生が関与しており、非定常な力が作用することにより通常より大きな力が発生することが確認されたと共同で発表した。
成果は、筑波大体育系の高木英樹教授、同・システム情報工学系の松内一雄教授、東工大大学院 理工学研究科 機械制御システム専攻の中島求 准教授らの共同研究チームによるもの。研究の詳細な内容は、6月12日付けで学術研究誌「Journal of Biomechanics」に掲載された。
世界で活躍するトップスイマーは、効率よく水中で高い推進力を発揮していると思われるが、実はその推進メカニズムはこれまで詳しくはわかってはいない。その理由は、ヒトが泳いでいる時に手や足が生み出している推進力を正確に測定する方法がないということが1つ。加えて、推進メカニズムを解明するためには、生み出された力だけでなく、その発生源となる手や足に作用する圧力の分布や周りの水流の状態を精緻に把握することも必要だが、ヒトを対象とした実験では再現性のある正確なデータを得ることが困難な点も大きい。
そこで研究チームは今回、中島准教授らが開発したヒトの腕部型をした水泳ロボット(画像1・2)を用いて筑波大学の回流水槽でヒトが泳ぐ際の手腕部の動きを再現させ、松内教授らが開発した「粒子画像流速計測技術」を活用して泳動作中の手部における流速分布や渦の発生状況の可視化を、高木教授らが開発した「圧力分布計測技術」を利用して推進力の発生源となる手部周りの圧力分布の計測を同時に実施できる新たな計測システムを構築し、水泳におけるヒトの(手部の)推進メカニズムを明らかにすることに挑んだ。
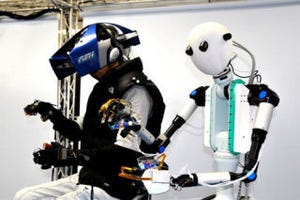
中島准教授らは、2012年6月にヒト型の水泳ロボット「SWUMANOID」を開発しているが、今回の水泳ロボットは腕部のみである。5つの自由度を持ち、内蔵されたモータをコンピュータで制御することで、ヒトの水泳運動を再現することが可能だ。各関節には歪計が取り付けられており、力およびモーメントが計測ができる仕組みとなっている。

|

|
|
画像1。今回、中島准教授らが開発した開発されたヒト腕部型水泳ロボット |
画像2。今回開発されたヒト腕部型水泳ロボットの水中における様子 |
実験の結果、大きな推進力が発揮される局面において、手部の周りに一対の渦の発生が確認された(画像3)。その渦の作用によって手の甲側にジェット流が生まれ、その流れが手の甲側の圧力低下を引き起こすと要因となっていると考えられる(画像4)。このように手の甲側の圧力が低下すると手のひら側との圧力差が拡大し、結果的に物体に作用する力が大きくなるというわけだ。このような渦による非定常な流体力の発揮は、昆虫などでは確認されていたが、今回の研究により、ヒトの水泳運動においても起こることが明らかとなった。
各画像をもう少し説明すると、画像3は泳運動中に最大の推進力が発揮された局面における流れ場の様子だ。6つのグラフの内、右の列は手部の周囲における水流の速度分布を示しており、左の列は渦度を示している。青色は右回り、赤色は左回りの渦を示し、その濃さは渦の強さを表している。また上段から中段、下段へと0.7秒ごとの変化を示し、中段から下段にかけて、推進力が最大となった。
画像4は、推進力が最大となった局面での流れ場の詳細だ。手部から放出された渦(赤色:Shedding vortex)と手の甲側に付着した渦(青色:Attached vortex)が対をなして存在していることがわかる。この渦対は互いに反対方向に回転しているので、渦の間にジェット流が発生し、青色の右回りの渦は、手の甲側に回り込みながら回転をしている。その渦流れによって手の甲側の圧力は大きく低下し、通常の状態より大きな流体力(Drag、Lift)が発生していると推察される。これらの力を「非定常流体力」と呼ぶ。

|

|
|
画像3。泳運動中に最大の推進力が発揮された局面における流れ場の様子 |
画像4。推進力が最大となった局面での流れ場の詳細 |
研究チームは今後、水泳ロボットの動作をさまざまに変化させ、どのような動きをさせた時に推進力がより大きくなり、その時どんな流体力学的現象が起きているのかの解明を進め、泳技術のさらなる改善へ応用していくという。最終的には、世界最速の泳ぎを実現させるための究極の泳技術の確立を目指しているとした。