|
|
会見するJAXA宇宙科学研究所 PLANET-Cプロジェクトチーム プロジェクトマネージャの中村正人氏 |
宇宙航空研究開発機構(JAXA)は11月1日、金星探査機「あかつき」の金星再会合に向けた軌道制御運用として、姿勢制御用エンジン(RCS)による第1回目となる近日点軌道制御を2011年11月1日13時22分(日本時間)から9分48秒ほど実施したことを発表した。
JAXA宇宙科学研究所 PLANET-Cプロジェクトチーム プロジェクトマネージャの中村正人氏は、「異常が感知されれば、すぐに連絡をしろと言ってあるが、そういった連絡もなく、速報値では予測値とコンマ数%の精度で制御できている。今後、テレメトリデータの解析のほか、JPLなどの協力を得て、より詳細な軌道の算出を行い、2回目および3回目の軌道制御を行っていきたい」と、これまで苦難続きであった「あかつき」の久しぶりの良いニュースとした。
推力に関しては、当初は第1回目、第2回目、第3回目でΔV100m/s、ΔV100m/s、ΔV70m/sを想定していたが、酸化剤の投棄時にΔV20m/sほど推力が発生したこともあり、予定をΔV90m/s、ΔV90m/s、ΔV70m/sへと変更することで、機体へのダメージを当初よりも若干軽減させているという。
なお、第2回目の軌道制御は11月10日に、第3回目の軌道制御は11月21日にそれぞれ実施される予定である。

|
|
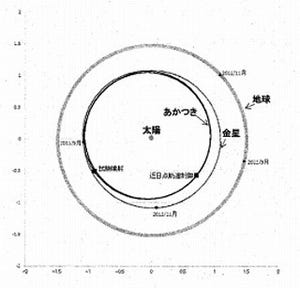
姿勢制御用エンジン(RCS)を用いた軌道制御の概要(出典:宇宙開発委員会報告資料) |